Not only has this thing infested my house, it has convinced me I should help it self replicate on my kitchen floor. How rude!
:-O
Ok, ok, little on the latest work:
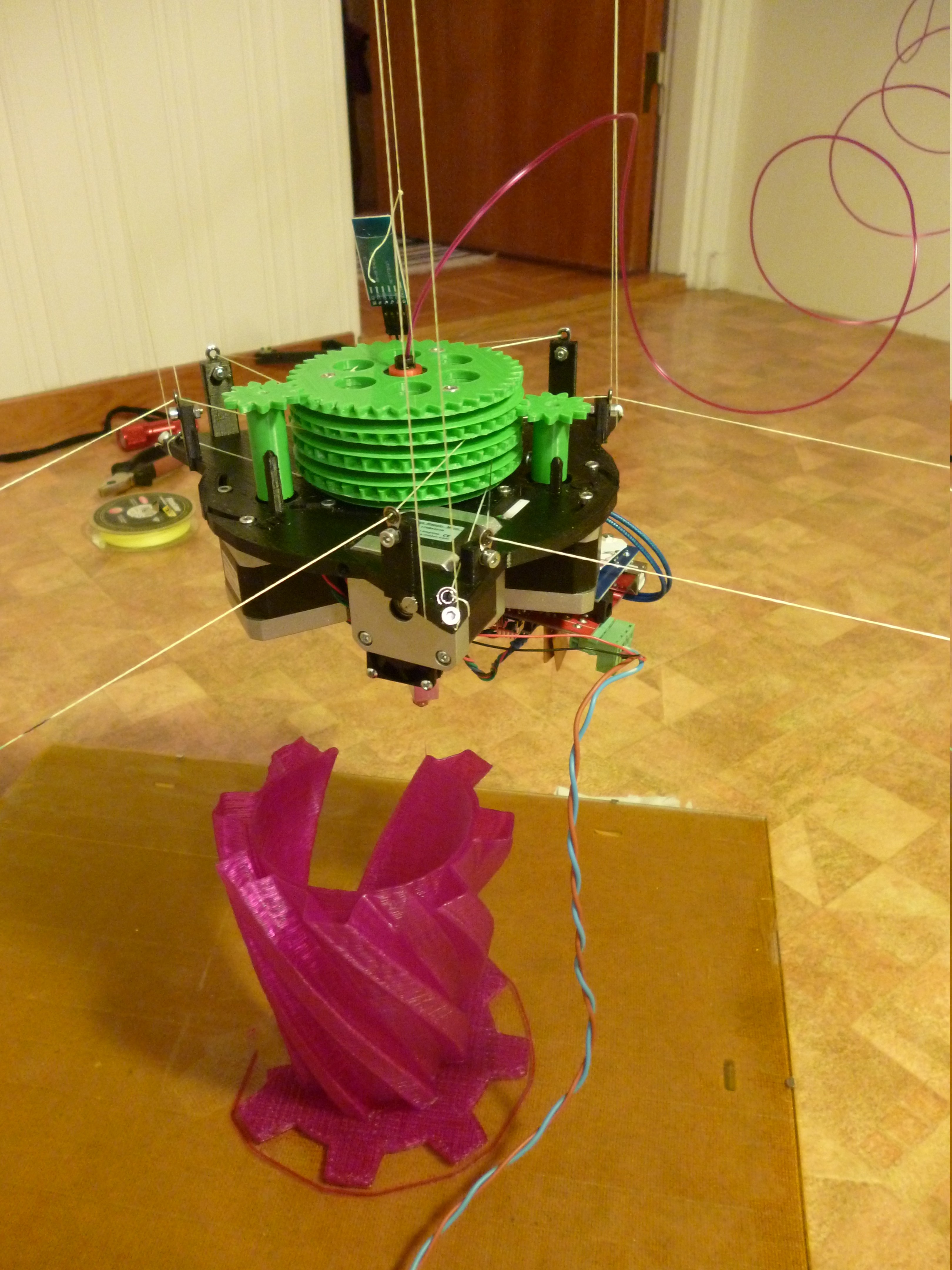
Clerck printing the latest version of its own bottom plate.
Finishing the bottom plate print. Print took 3 hrs.
My calibration still isn't top notch, but I'm working on it.
To ease calibration I've done three modifications.
Removed central counter weight and mounted three corner- counter weights. Helps stability, gives less rotation
Mounted free pendulum (aiming plumb) from the center of the ceiling frame part. Is used when I'm tightening the strings with
G3
Gave each parallel string independent adjustment screws
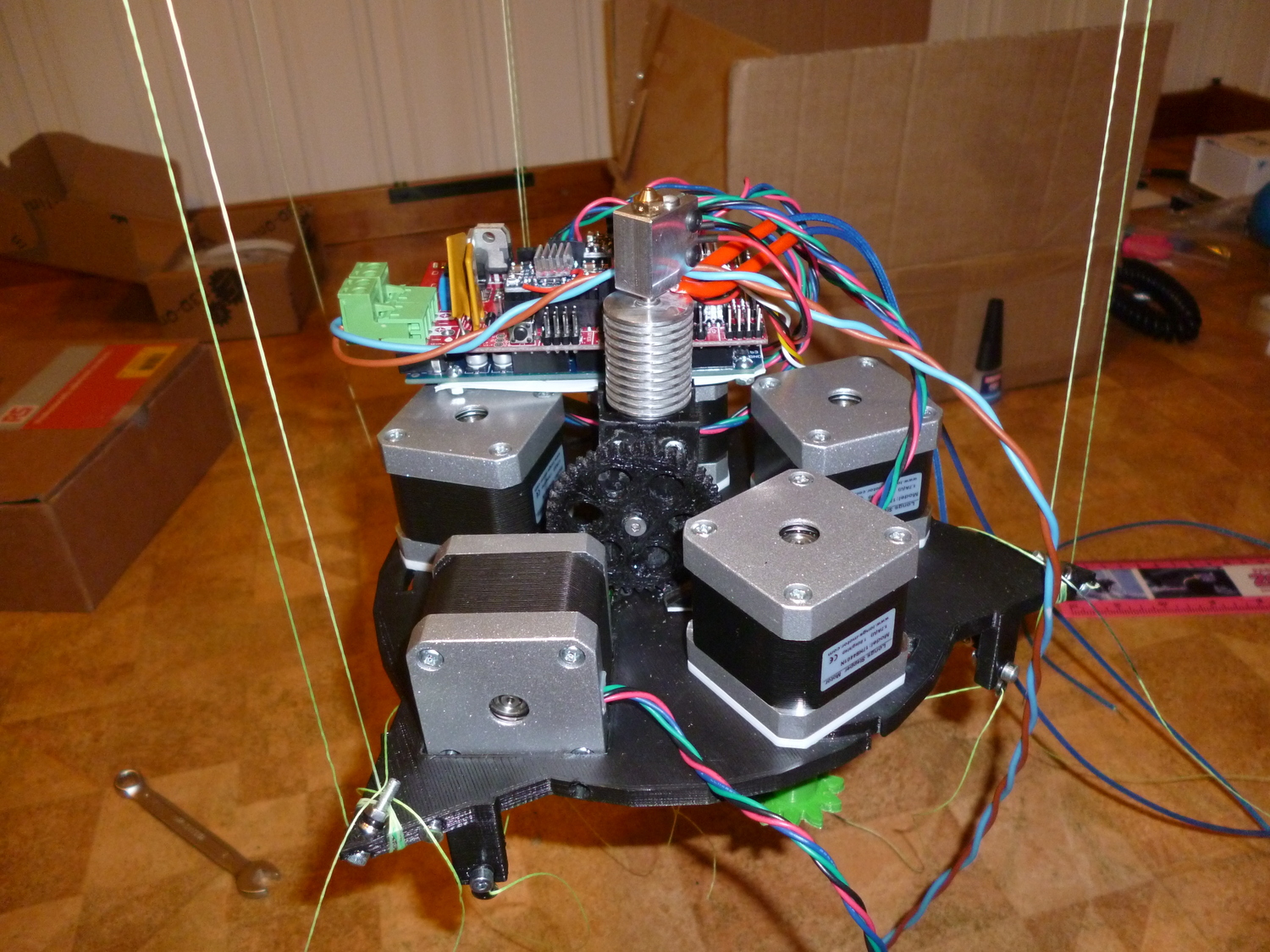
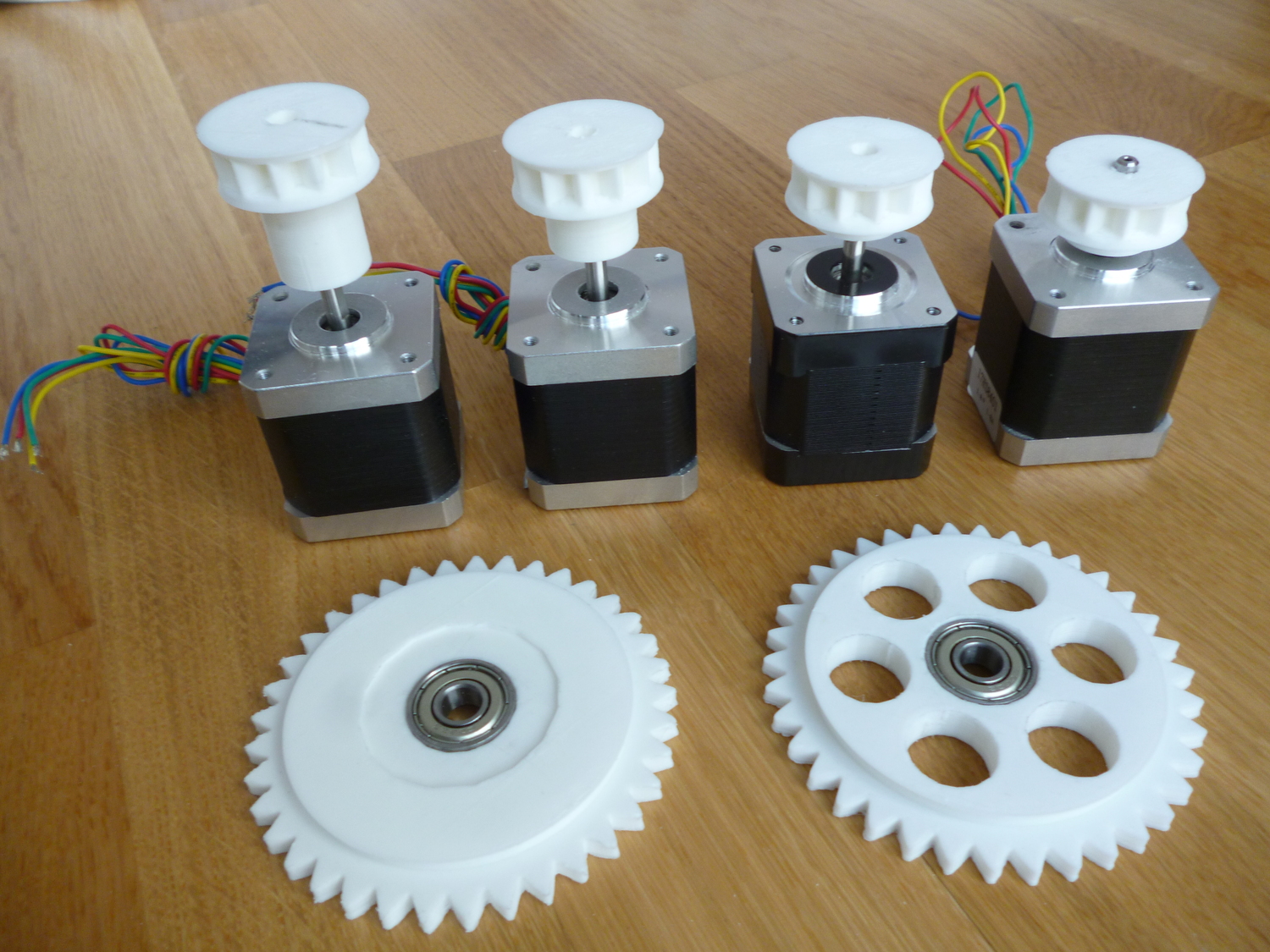
To get some more power, I also geared down the ABC motors by a factor of 2.
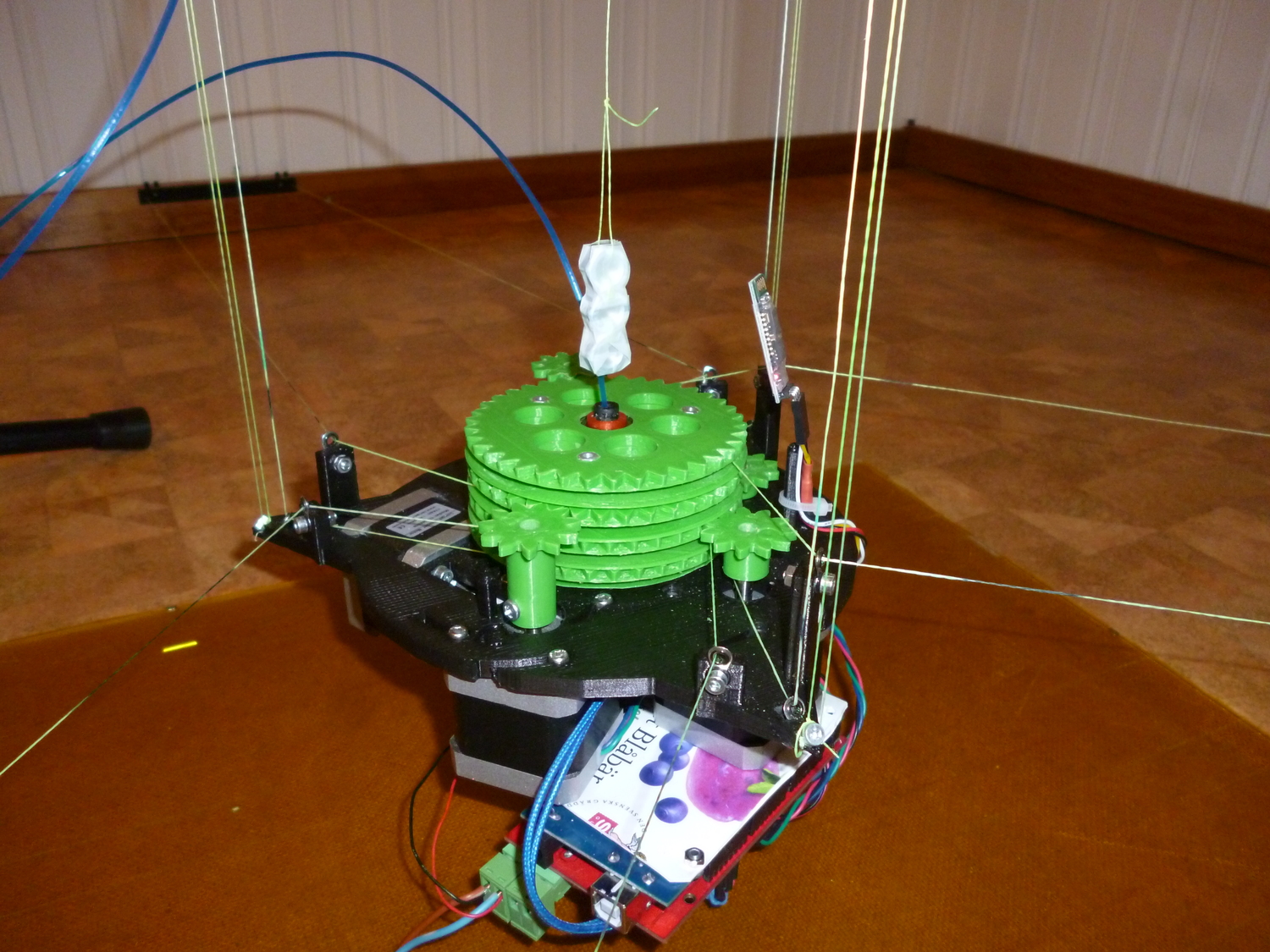
Picture showing the aiming plumb in a central position above Clerck.
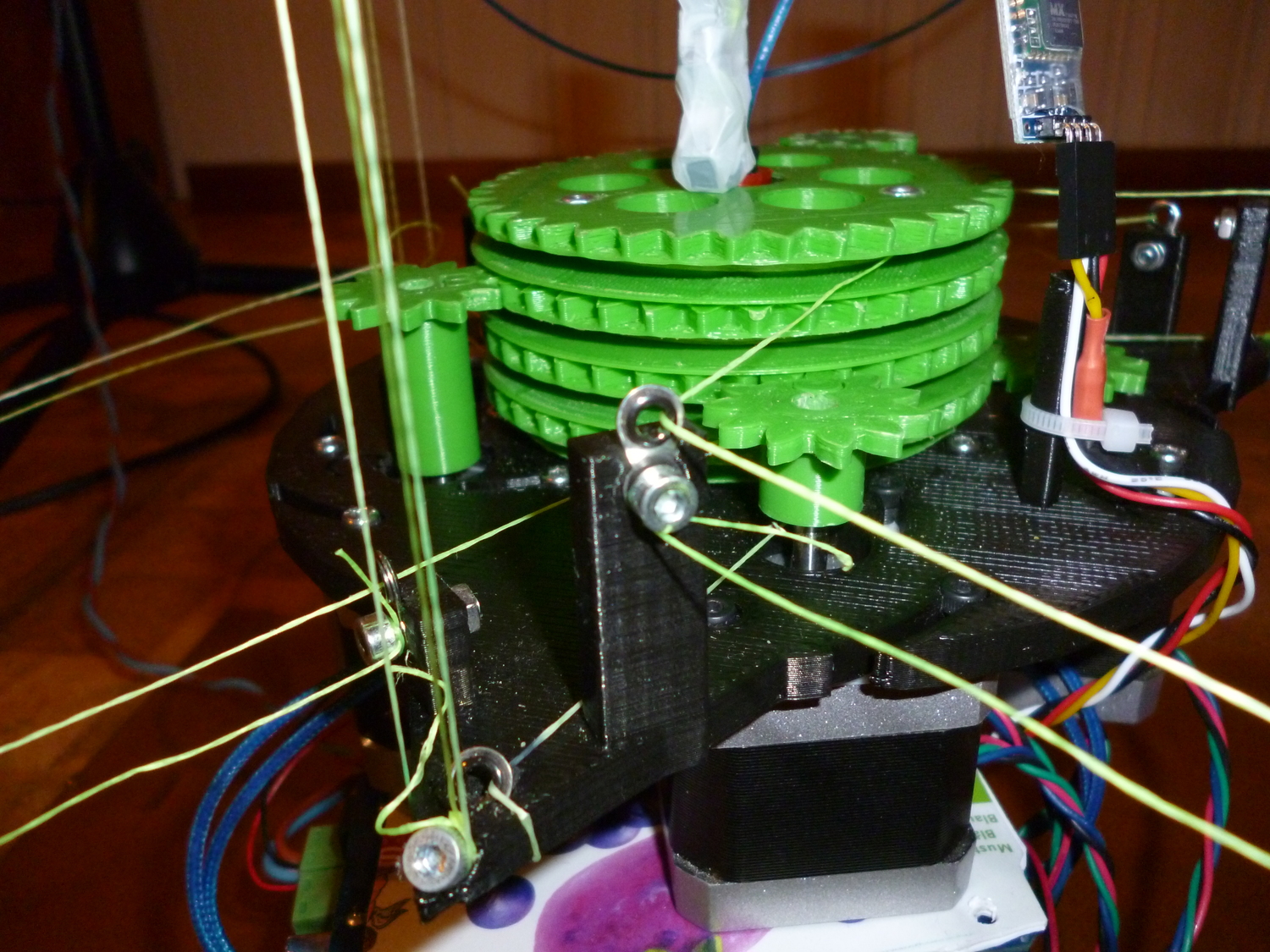
The ABC frame parts now look like this. They have gotten independent adjustment screws and bearings gearing the motors
down by a factor of 2.
The new attachment point for ABC lines on board Clerck.
(Missed the camera focus somewhat, sorry.)
As time gets shorter and shorter, as do these posts. So long!
- tobben
Torbjørn Ludvigsen
Not only has this thing infested my house, it has convinced me I should help it self replicate on my kitchen floor. How rude!
:-O
Ok, ok, little on the latest work:
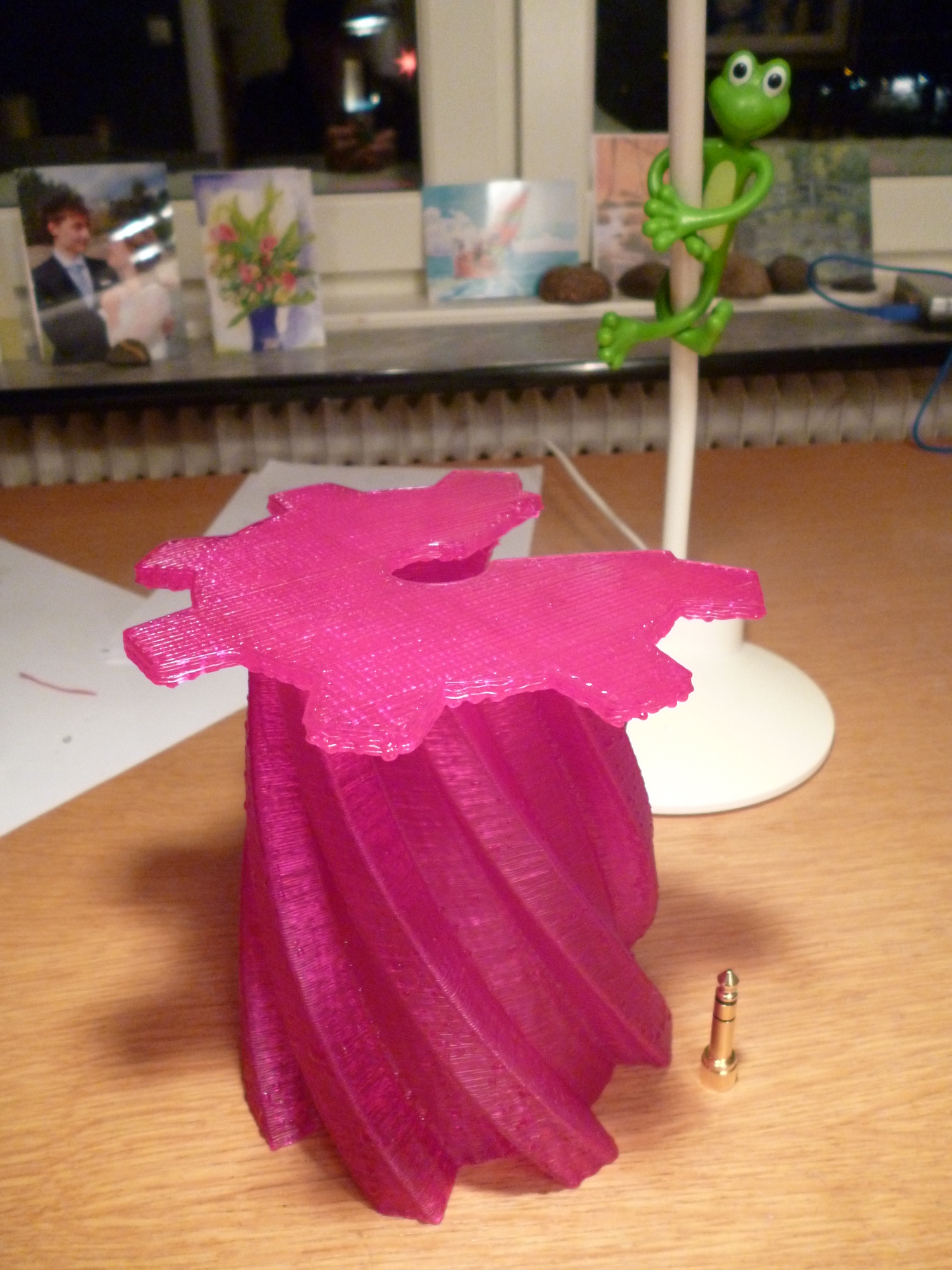
Second finished print
30-11-2015
After ~ 6 hours of printing, Clerck has reached a height of ca 900 mm. Finished print is 950 mm tall.
The print was a very exciting one, but I'm very tired so I jump right to...
Lessons learned
Manual reposition and restart is possible with 10 % print speed and lots of patience.
A guiding light strip of light showing the tangent line
along which a (possibly paused) Clerck is planning to move next would be very helpful when repositioning half finished
prints or confused Hangprinters
Clerck eats lots of filament. Splicing PLA with candle in the last second is not a recommended approach
Extruder is not accessible enough
Coming close to singularities means skipping steps. Plan for this in Slic3r
The ABC motor closest to its anchor point is always the one (among ABC) with the heaviest load because
It usually works against pendulum movement
It has the worst working angle (given that all anchor points are at same z-height)
When ABC-lines point downwards, more counterweight must be added. D-motor reaches limit when it lifts ca 1.5 kg and has total
ca 6 N downwards drag from ABC motors.
My D-motor won't do z-lifts (at 40 mm/s) when working against 20 N without skipping steps
Too few line segments per second make 180 degree-turning ends of rectilinear infill malformed
Calibration errors' effect grows with distance from origo
I mentioned after doing the first print that the lines' slack grew with z-height.
This was due to calibration errors shown in the figure below
Imagine that Clerck hangs along the dashed line and that l0 is the correct length of an ABC line at home position.
Blue lines reflects the firmware's view of the world according to its calibration.
Red lines reflect the actual anchor point compared to Clerk.
Notice that initial actual line length is correct.
After homeing the printer, the red and blue lines increase/decrease synchronously (they are both controlled by Marlin).
Z-error (here called d) is constant throughout the print, but the observer ABC line length error grows.
The sketch above shows the angle between ABC-line and XY-plane.
Similar sketches apply to angles between ABC-lines and planes in all directions.
This explains why the effect of calibration errors grow with distance from origo (point 8 in the list above).
Tightening the strings
When starting the printer, I've noticed that I often want to control the motors individually without affecting
position counters and step counters in the firmware.
I would like the other features of Marlin G1, like jerk look-ahead, acceleration, millimeter units etc.
So I altered the stepping code in stepper.cpp to look like this:
Note that the type block_t got a new count_it member compared to original Marlin.
I then made Marlin accept a G3 command with A, B, C, D and/or E arguments.
When I want to tighten the A and B lines 2 millimeters each, I say G3 A-2 B-2.
But then there's always the issue with buffering and such during print.
A manual way of tightening/loosening comes in handy during long and under-prepared prints like the one in the video above.
So I added some length control screws in the ABC frame parts.
See figure below.
Screws to control ABC line lengths manually.
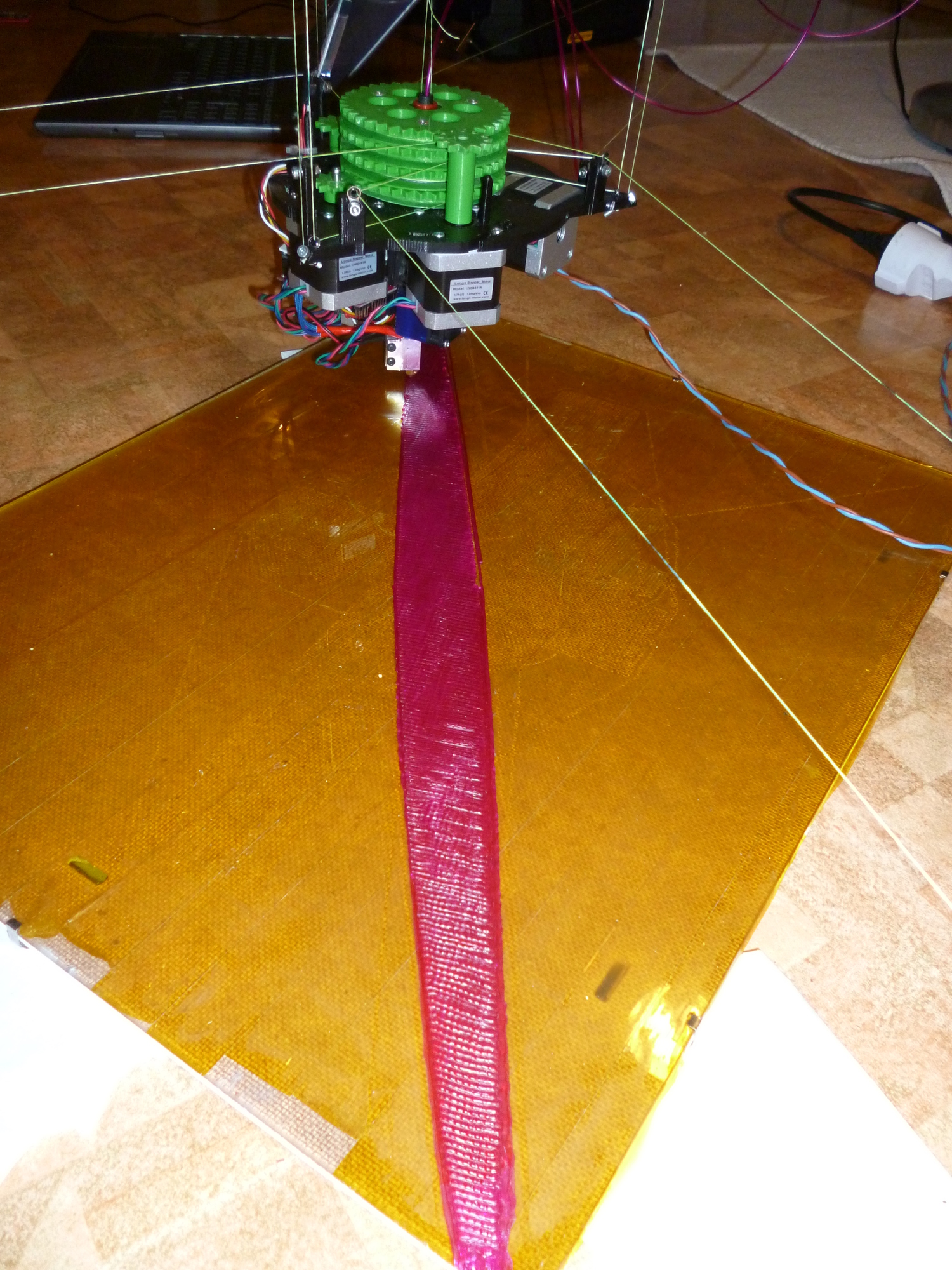
The first layer stretches across the diagonal of my sacrificed picture frame, and is ca 600 mm long.
Longer first layers would be no problem if I had a bigger print bed.
The observant reader can spot slightly non-linear infill lines closest to the camera.
This is due to errors in calibration.
The amount of over-extrusion you see leads to skipped steps, but only a few.
They were handled with manual line control screws during print.
Tools were laid down on first layer's ends to keep it from warping.
It wasn't enough though. After three hours, the print wobbled like a giant toy for dogs, giving mediocre print quality.
When the first layer were better clamped down and auto cooling reduced print speed for me, print quality increased drastically.
It might also have an impact that there was less overhang near the top of the print.
The thicker layer near the top in this picture is because the D-motor skipped steps on nozzle lifts (see point 6 in the
numbered list above).
I suspect Clerck's most useful feature is the ability to print long things.
Long things get stronger if layers are along the longest direction of the object, so I guess I should be concentrating on
first layers.
But printing high was a lot of fun.
Plans forward include automatic homeing (see here)
and tall, flexible guides to prevent filament and power chords from getting grounded by gears or melted by outside of hot
end.
Until then, bye bye.
- tobben
Torbjørn Ludvigsen
The print was a very exciting one, but I'm very tired so I jump right to...
CPUs, sqrt and free design hardware
28-11-2015
I've been dreaming some more about a full free design, open source hardware tool chain.
It might seem like the OSHW movement is a far way from tinkering with free DIY CPUs, but I'm not sure it's actually that
far off.
Lack of perceived CPU freedom is partly because of ignorance (well, lack of time), of course.
SPARC is open source and that the Intel 4004 schematics are available.
However, I don't see many easy-to-build CPUs around.
I'm not a silicon expert, but I suspect that the best place to grow a free CPU project would be within/linked to the excellent
AVR and Arduino communities.
The first DIY CPU will probably need to resemble currently common (among tinkerers) CPUs, to attract enough contributors.
Same logic that made GNU so similar to Unix.
Since I hope such an ambitious project will emerge, I'm not a fan of adding complex and expensive 32-bit GHz processors
to my RepRap designs.
I know others have good reasons for loving 32-bit.
Non-Cartesian printers are gaining popularity and speed increases.
Common firmwares discretizes straight gcode lines tiny line segments.
These line segments need to be kept very short to avoid visible discretization errors.
Users simply want more segments per second than current firmwares for 8-bit processors gives them.
I'm no master profiler or optimizer, I'm more a kamikaze-hack-guy, but I thought I'd share a code blob with you.
The rough_sqrt has an error of ca 0.06 mm for an input of 11520000 mm (that is sum of two squared 2400 mm lines).
Error seems to grow like the square root of the input, that is linearly with x and y if used like rough_sqrt(x*x + y*y).
Execution time is somewhere between 80 % and 90 % of the standard (avr-libc) sqrt.
Be warned that it's not well tested, it won't work on NaN, Inf or 0,
it will treat negative numbers like positive ones.
I admit I really don't understand everything that's going on in here.
I removed most of my comments because I suspect they contain errors that would confuse a more experienced assembly programmer.
If you want to understand some of it, look for __fp_split3.S and sqrt.S in the avr-libc repo.
This is not a perfect magic solution, its mainly just ignoring bottom byte of mantissa as well as all corner cases.
The approach could be further improved by tailoring a rough_square function with less precision, since the
precision of x*x + y*y is squashed by rough_sqrt anyways.
Is it a drop-in replacement for Marlin's calculate_delta function?
It would be nice if someone more experienced than me would give his/her ten cents, I don't know.
Put it here just to share my thoughts on why someone would put hours into assembly programming pesky 8-bit CPUs.
I should probably approach the Marlin developers with profiling- and code questions.
By the way, I've programmed a bit (maybe 5 - 7 %) on an AVR-simulator.
Hope some day we can automate AVR assembly generation (the blob above took hours and hours).
An AVR simulator would be one way to work on it.
Repo here.
- tobben
Torbjørn Ludvigsen
I've been dreaming some more about a full free design, open source hardware tool chain.
It might seem like the OSHW movement is a far way from tinkering with free DIY CPUs, but I'm not sure it's actually that
far off.
Making the Hangprinter project easier to follow
27-11-2015
Subscriptions
I've made an RSS feed for this blog.
How it looks and how subscriptions work depend on your browser and subscriptions manager.
Be warned that this blog is all i one HTML document for now, so loading RSS previews and such will load the complete blog.
However, the CSS and markup is so simple that reading the blog within any HTML+CSS rendering program will probably work
flawlessly.
Torbjørn Ludvigsen
I've made an RSS feed for this blog.
How it looks and how subscriptions work depend on your browser and subscriptions manager.
Be warned that this blog is all i one HTML document for now, so loading RSS previews and such will load the complete blog.
However, the CSS and markup is so simple that reading the blog within any HTML+CSS rendering program will probably work
flawlessly.
First finished print
23-11-2015
Hello blog, hello World, hello guys and girls.
Did another test print today, and this time it finished.
After two hours of print, the lines have gotten a ~2 mm slack.
The observant viewer could spot the unwanted pendulum movements as well as the jumping slack line.
An attempt to depict the linearly growing sinusoidal error.
My current theory is that it is due to accumulating roundoff errors in the firmware.
No direction were notably more slack than any other, no skipped steps were heard.
Skipped steps are very unlikely to be the cause since the error grew even if all lines were slack.
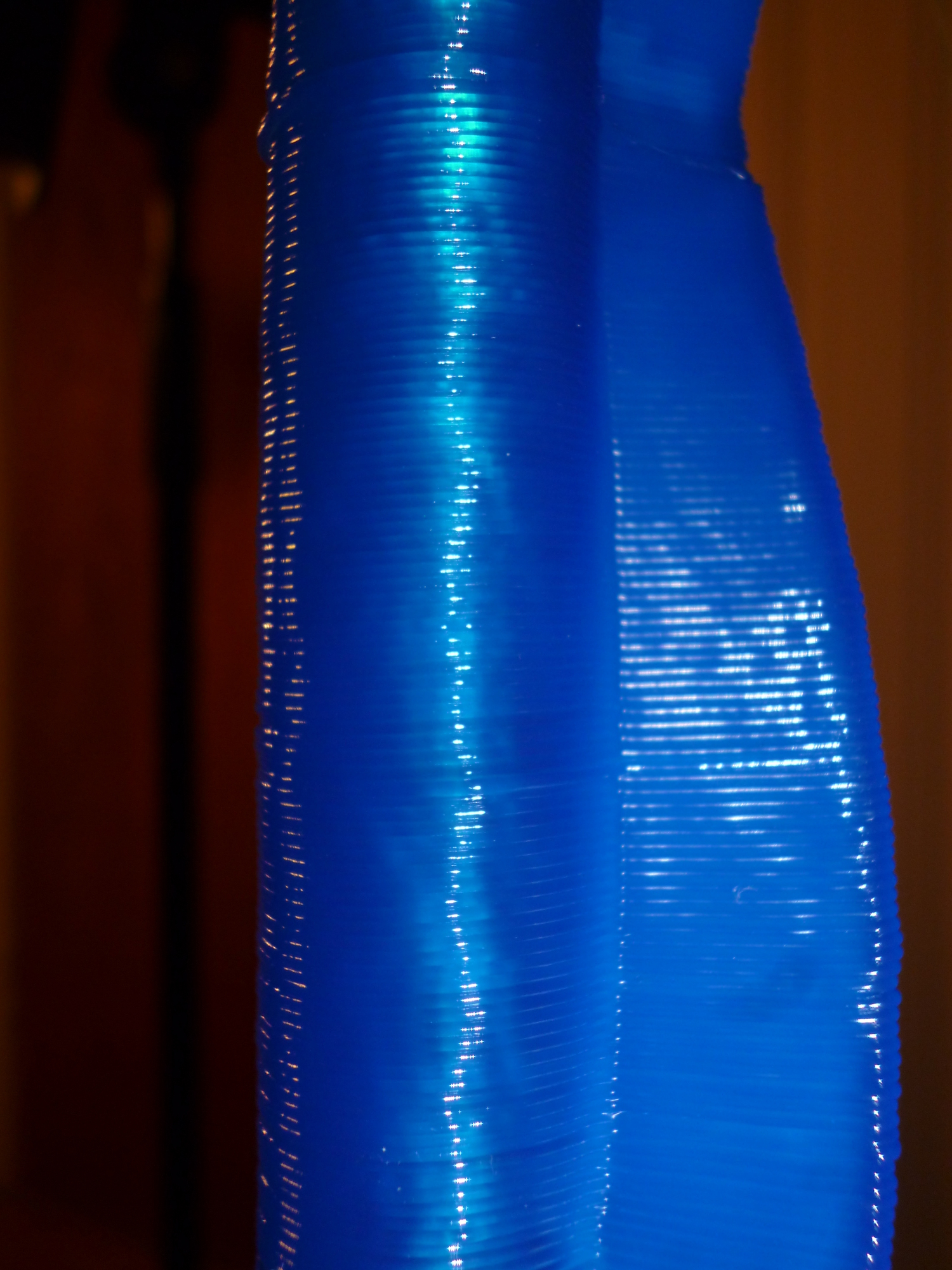
The final height of the figure came out close to perfect as far as I can measure (admittedly not very accurate, but still).
Close to the base of the print, error is surprisingly small, comparable with what I get out of my old Mendel.
Don't ask me about the intended use of this shape, I don't know.
It's edge demonstrates nicely how Clerck doesn't handle sharp turns very well.
The droplets along the edge comes from sharp 180 degree turns (100 percent rectilinear infill), which gives a tiny rotation
around an axis in the xy-plane (lifts one corner of Clerck).
This rotation would be minimized by decreasing the printer's counter weights along the D-axis, so the printer's corner
gets heavier/harder to lift.
A little portrait at the end, even though we all know what the printer looks like by now.
Full print time for this was 2 hours and 16 minutes.
Weight of the print is 190 grams, so extruder had an average output of 23 milligrams per second.
Both height and width of print is 150 mm.
Print speed was ca 35 mm/s.
I will compensate the accumulating slackness of the lines by adding manual tightening screws at each anchor point.
In the longer run I will try to get away from 32 bit floats in firmware anyways, since it limits scalability.
Having said that, I guess I have to try to implement some kind of custom bignum for 8-bit hangprinter firmwares sometime ;)
- tobben
Torbjørn Ludvigsen
Hello blog, hello World, hello guys and girls.
Did another test print today, and this time it finished.
Meet Clerck, the hanging RepRap
22-11-2015
Did the first test print just now:
The hanging RepRap trying to do its very first print for the fourth time.
A couple of minutes later, same print as above.
The printed OSHW logo.
Closer look at the printed OSHW logo.
The sparse pattern was not intended and is due to wrong nozzle diameter setting in Slic3r.
Looks kind of cool though.
With 0.8 mm nozzle, even two 0.6 mm layers of a sparse pattern like this is quite stiff.
Even though the driver chip for the C-motor broke after ca 12 minutes of printing, I'm very happy with todays test printing.
Broken chips are no surprise since they have taken floor-crashes, very high currents with suboptimal cooling, soldering
directly on legs and
manual motor turning during this development phase.
I'll replace it and print some more tomorrow.
Now that the printer works, it should get a name.
Following RepRap tradition, I'm naming it after a biologist: Carl Alexander Clerck, or just Clerck.
I chose him because he worked with Swedish spiders a long time ago.
The printer moves kind of like a spider with four spinnerets, and I'm Swedish, so it fits. Kind of.
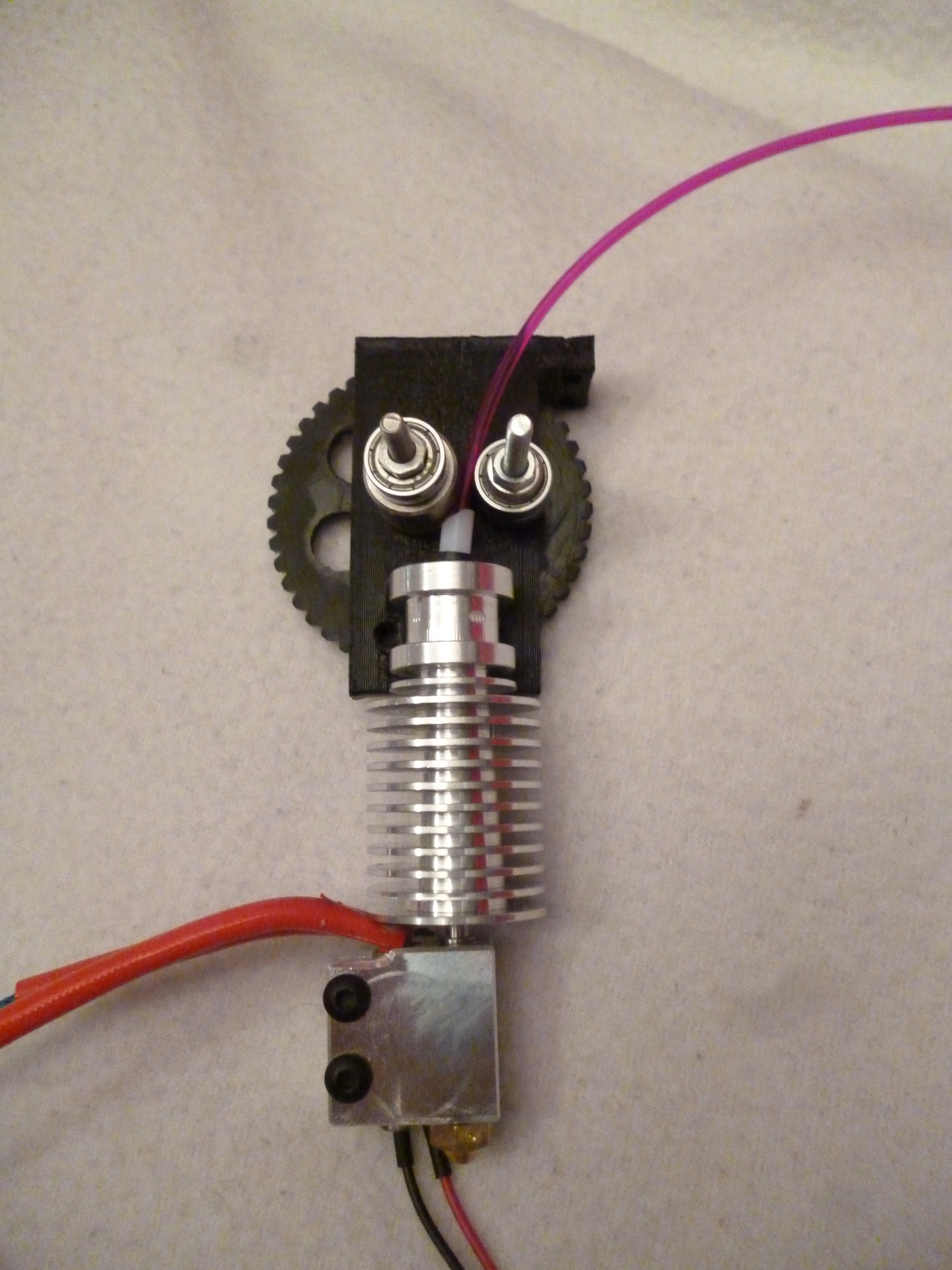
The mounted Tble-extruder on the (upside-down) Hangprinter.
Looks kind of the sketches and mock-up in my previous post, but it's been more work than I expected (hoped for...).
I've called it Tble-extruder here since I think of it as "Terrible extruder" but hope to be able to call it "Table extruder"
within a few days.
My plan is to print a little table with it when I've got it working.
As stated in the previous figure caption, it's been many hours of work so far.
The CAD design described in my previous post wasn't really well thought out.
Don't follow my footsteps and try to build the extruder described in the previous post.
Since it's not very interesting, I've put the list of mistakes in another document (here).
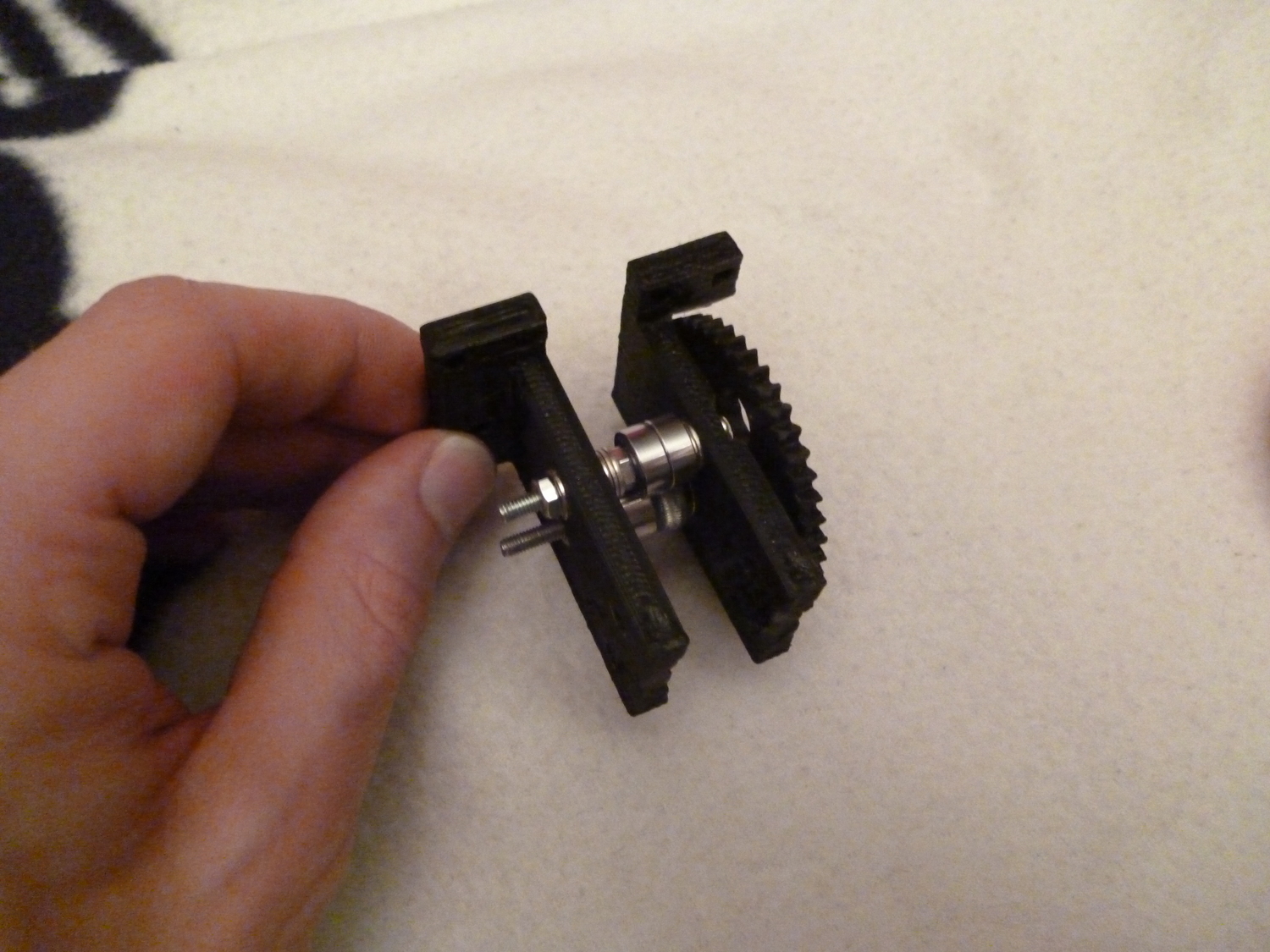
Anyways, putting it together has had its pleasant moments. Pictures of a couple of them below.
Still happily unaware that the width is way off when I take this picture.
It looks nice.
The idea of what I was after.
Notice how the hot end is offset compare to the hobbed bolt.
Also notice the sanded gear teeth.
Changing shape gears by hand is either impossible or just very time consuming.
This time it went all right, but I really wish I had a RepRap at home now.
- tobben
Torbjørn Ludvigsen
I've called it Tble-extruder here since I think of it as "Terrible extruder" but hope to be able to call it "Table extruder"
within a few days.
My plan is to print a little table with it when I've got it working.
Extruder work
16-11-2015
Hi! Just a small update.
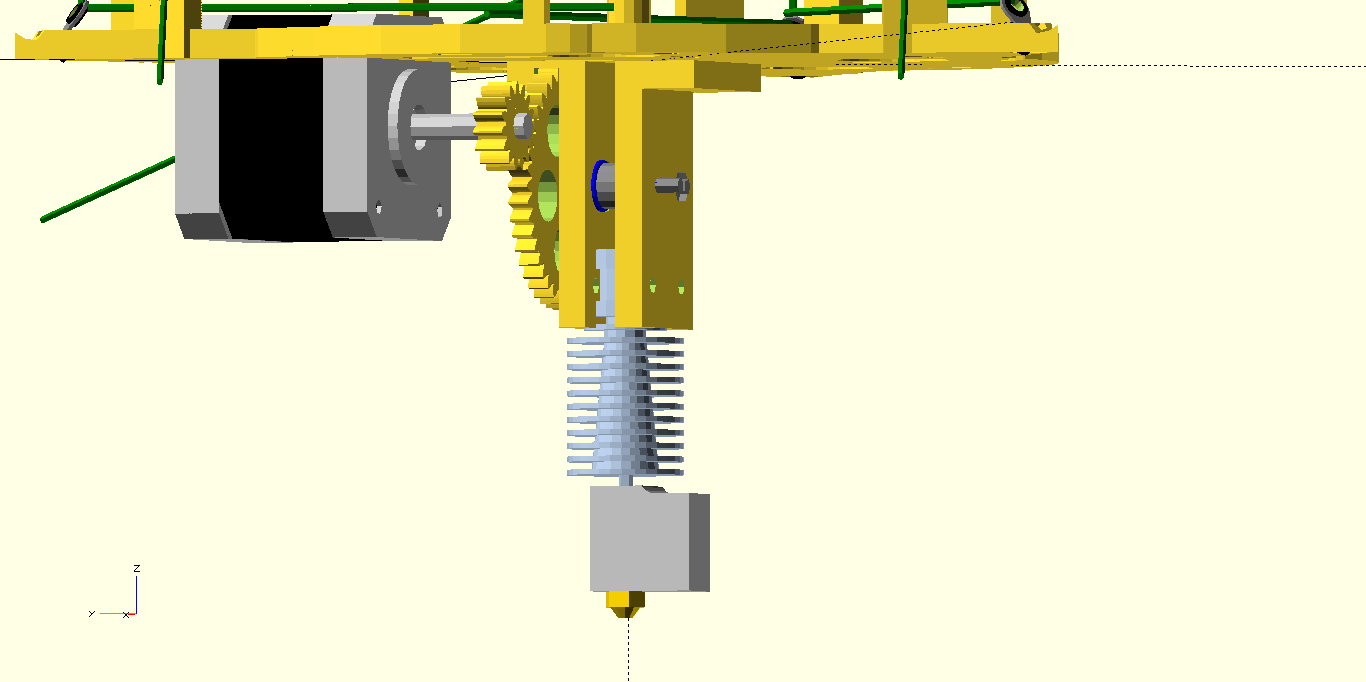
I've done some design work on the combined extruder and hot end mount.
A view from the side of the solution I've chosen.
It's Wade's style extruder with one hobbed bolt and 1:3 gearing.
I know already that this design will limit the printers speed and reliability.
A pair of hobbed bolts working together (rather than one hobbed bolt and one 623 bearing)
and a gear ratio closer to 1:2 would be better suited for Hangprinter's needs.
The design is like this for now because of limited space between the other motors.
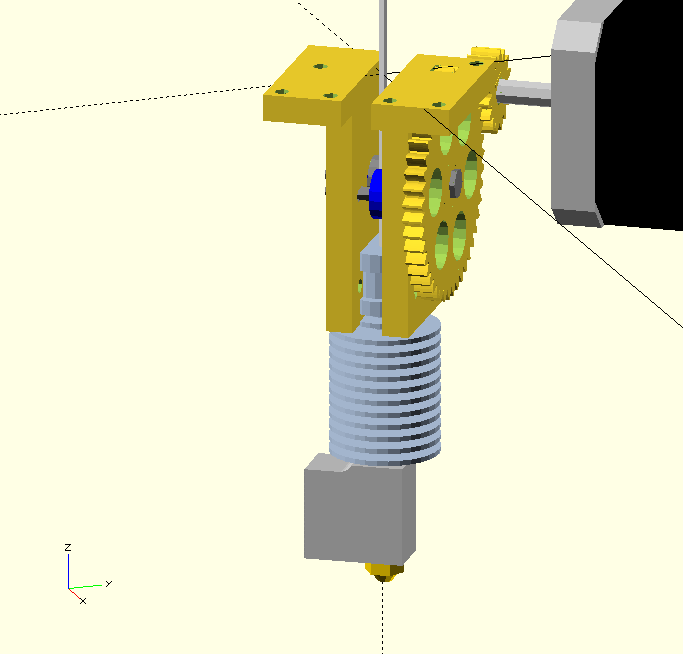
Another viewing angle of the same extruder.
You may notice that the large extruder gear appears in a rectangular hole at the top.
This is to allow the needed radius of the large gear.
When I redesign the extruder later, I will try harder to preserve symmetry...
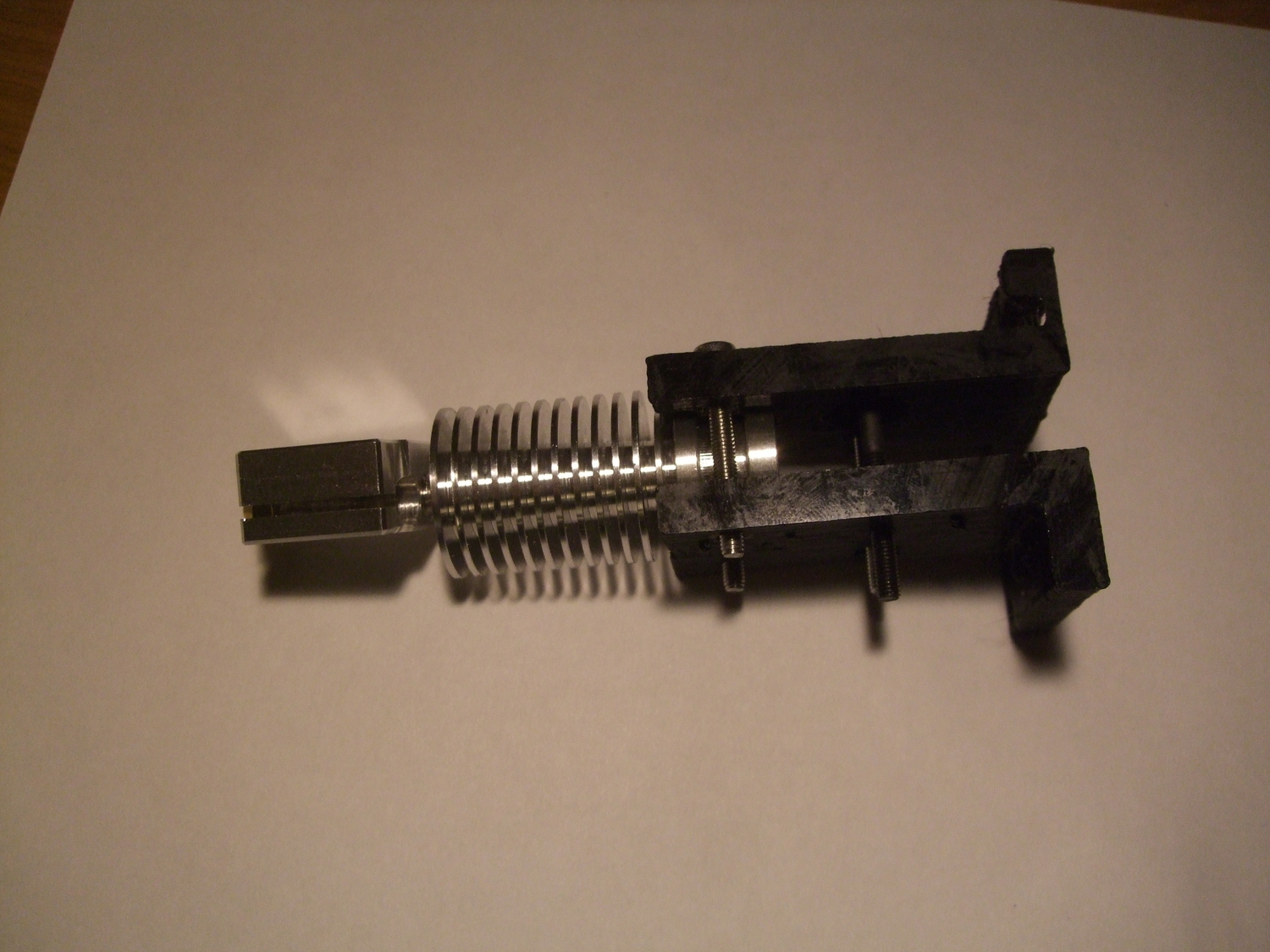
The physical extruder and hot end mount with the E3d v6 Volcano mounted.
It's really fixed, no wobbling at all.
If we're lucky, test printing can start tomorrow =)
- tobben
Torbjørn Ludvigsen
Hi! Just a small update.
I've done some design work on the combined extruder and hot end mount.
So what takes me so long?
28-10-2015
The last 20 days, I've been writing on this report about the resin 3D-printing market.
As a part of solving my bureaucratic problems I needed to complete a 80 hour
project aiming to improve the quality of my university programme.
I got a request from the head of the programme, and the result is
this report.
Be warned that it's probably only interesting for those who read Swedish and
hold a fair interest in cheap resin 3D printers...
- tobben
Torbjørn Ludvigsen
The last 20 days, I've been writing on this report about the resin 3D-printing market.
As a part of solving my bureaucratic problems I needed to complete a 80 hour
project aiming to improve the quality of my university programme.
I got a request from the head of the programme, and the result is
this report.
Hardware upgrades and bureaucratic problems
6-10-2015
This post has some practical stuff about my master's thesis, but
first I want to show you the hardware upgrades in a little video:
The Hangprinter dry printing a 270 mm square with sparse infill at 52.5 mm/s.
Notice how leftmost lines get slack at rightmost positions.
You'll notice that the motor gears and the middle sandwich of spools and gears are changed since the last video.
The motor gears now have one tooth less, and the sandwich gears have one tooth more.
The spools have also gotten a smaller radius.
This have geared the motors down by 14 percent, increasing torque and hence print volume.
Since motors spin at only ca 1 revolution per sec (at most when speed is 52.5 mm/s), dynamical torque
drops less than 14 percent due to higher speed.
That is, gearing down motors gave a net force gain at 52.5 mm/s.
Disks have been added above and below spools to keep the lines in place.
Without the disks, I spent more than half my testing time putting lines back in place.
With the disks lines have consistently stayed put.
There are still a long wish list of technical improvements, and I expect it to grow.
A mounted hot end
An extruder
Re-mount a modified drv8825 for D-motor (previous one got smashed) and get rid of counter weights.
Feeding the stepper drivers a higher voltage than 12 V would give stepper motors more torque.
Higher voltage will give the stepper driver the possibility of increasing motor current faster.
Experience shows that the drv8825 is able to take advantage of this, resulting in more motor torque.
Faster code for computing sqrt((x-x0)^2 + (y-y0)^2 + (z-z0)^2) would allow
more segments per second/a smaller processor/more closed loop processing.
A cheap accelerometer and gyroscope (like the MPU-6050
datasheet)
would enable both automatic homing (think crashing hot end into build plate style) and some other closed loop feedback.
Excellent free code to build upon is found in the
FreeIMU project.
Since print times will be long, closed loop feedback is highly desirable.
Using nop for timing the drv8825s wastes up to ca 4000 processor cycles per second (52.5 mm/s ref speed, 1/8 stepping).
This is only 0.025 percent of 16 MHz, but a pure waste. Doubling speed and quadrupling microstepping would give 2
percent waste.
Notice that this waste can not be reduced by increasing processor frequency.
However useful the improvements above, they probably won't be deployed soon.
I'll explain why in the second part of this post.
The second part of this post
My engineering studies contain university courses from two different Swedish universities.
Accreditation complications has forced me to move back across the country and study undergraduate math again for six months.
Because of this and my former supervisor's schedule, I'm now searching for new external supervisor for my half-finished
master's.
We have two supervisors involved in a Swedish engineering masters:
one from within the university and one from a company or another university (the external one).
I'm searching for a new external supervisor for this project.
My new external supervisor will get paid for the full master's.
Any suggestions regarding master's supervision? Please email me at tobben(AT)fastmail(DOT)fm or post
to the forum.
- tobben
Torbjørn Ludvigsen
This post has some practical stuff about my master's thesis, but
first I want to show you the hardware upgrades in a little video:
Pics from calibration
21-9-2015
Thought I'd just post some pictures from the calibration run yesterday.
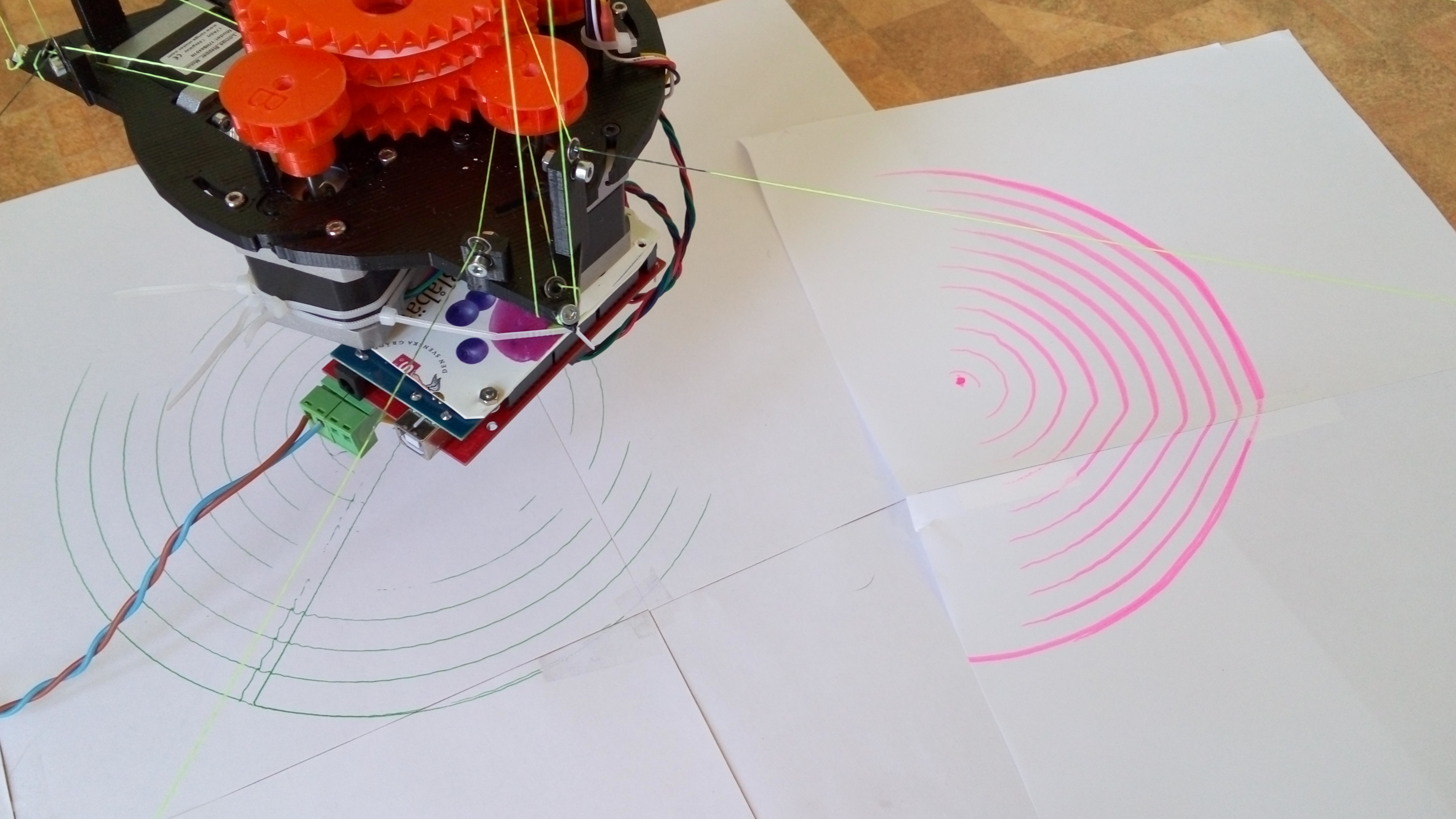
The circles should have been complete, but as we see they are not.
Since we don't really know how flat the floor is and since the tip of the pen is very short,
this doesn't tell us very much about Hangprinter's z-error. Photo: Olof
This comparison tells us that removing the 5 cm error in calibration really did help. Photo: Olof
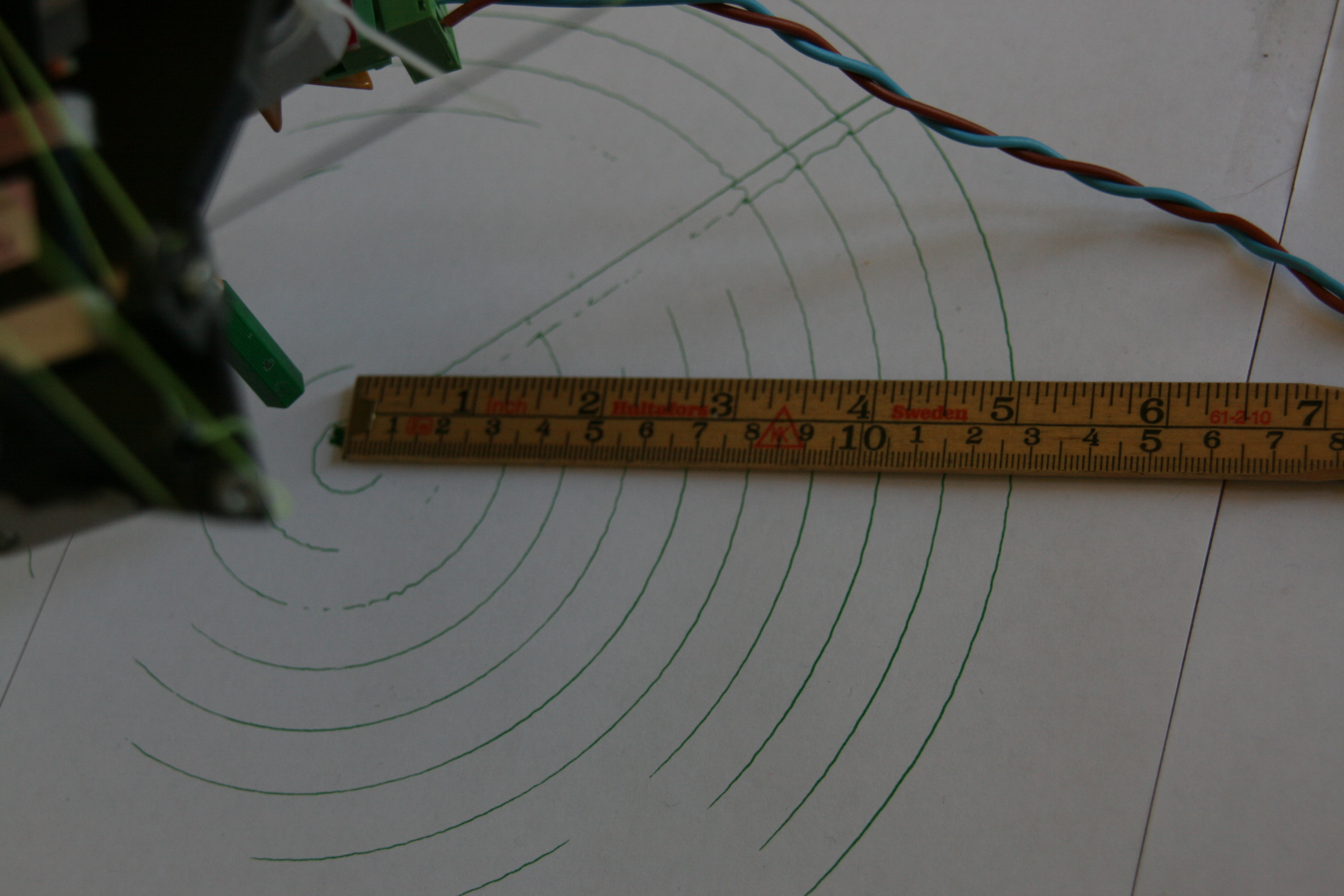
The outermost circle should have had a radius of 125 mm.
Error in the xy-plane seems to be less than 3 mm.
(Based on my best efforts with calipers and a pair of compasses, not this measurment stick...)
A friend came by and gave some help and took some pictures. The guy on the floor is me. Photo: Olof
I'm going into hardware upgrades for some days now, so update frequency may slow down.
- tobben
Torbjørn Ludvigsen
Thought I'd just post some pictures from the calibration run yesterday.
More progress
20-9-2015
As it turned out, I had made a 5 cm mistake when measuring positions of anchor points.
Did one print today with much better precision:
- tobben
Torbjørn Ludvigsen
As it turned out, I had made a 5 cm mistake when measuring positions of anchor points.
Did one print today with much better precision:
Some progress..
18-9-2015
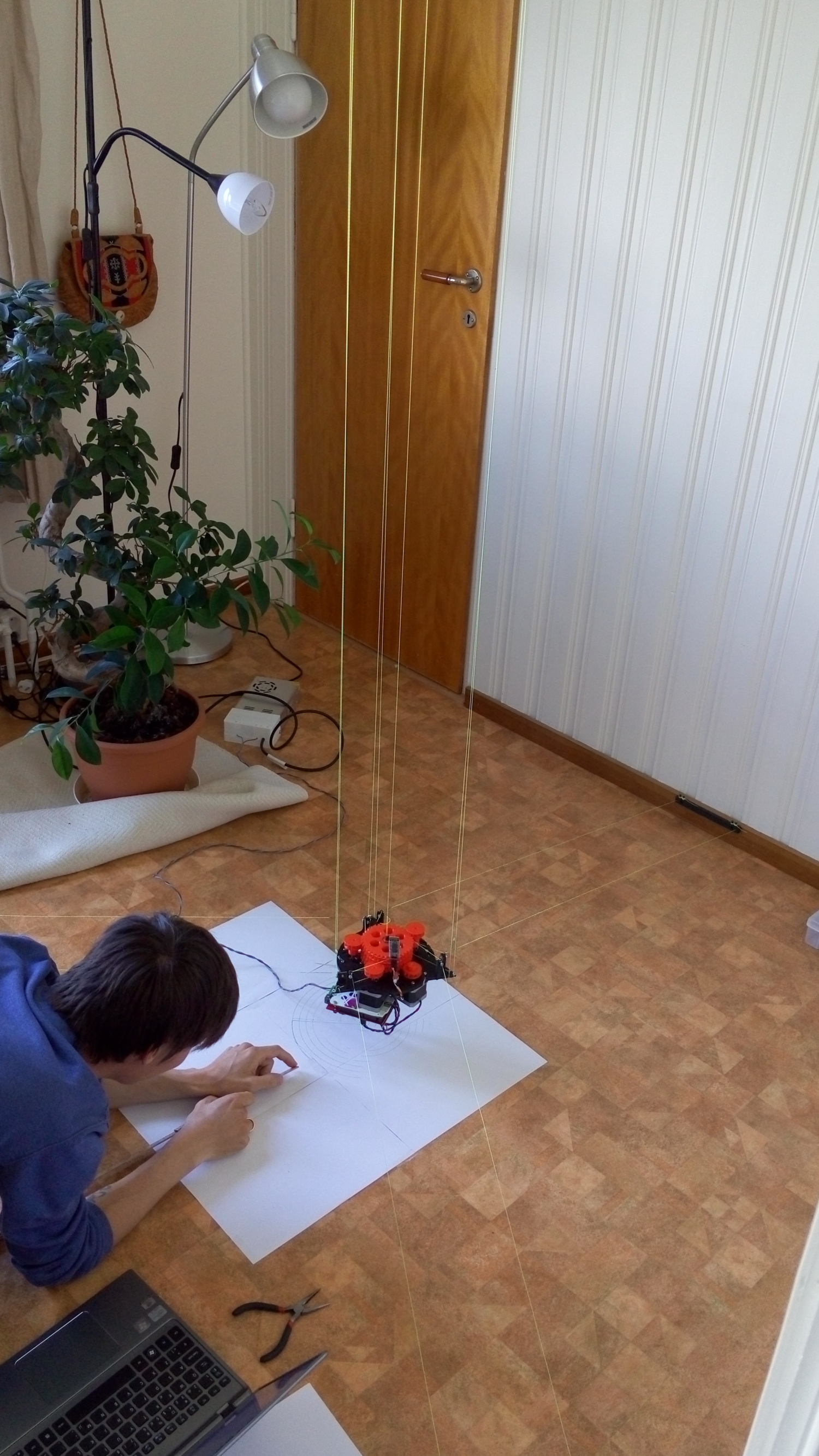
Today I'm kind of split in two. One part of me is very satisfied with having a moving robot, even though precision
is ~ 1cm. I want to play around with it, make it go high, low, fast and slow.
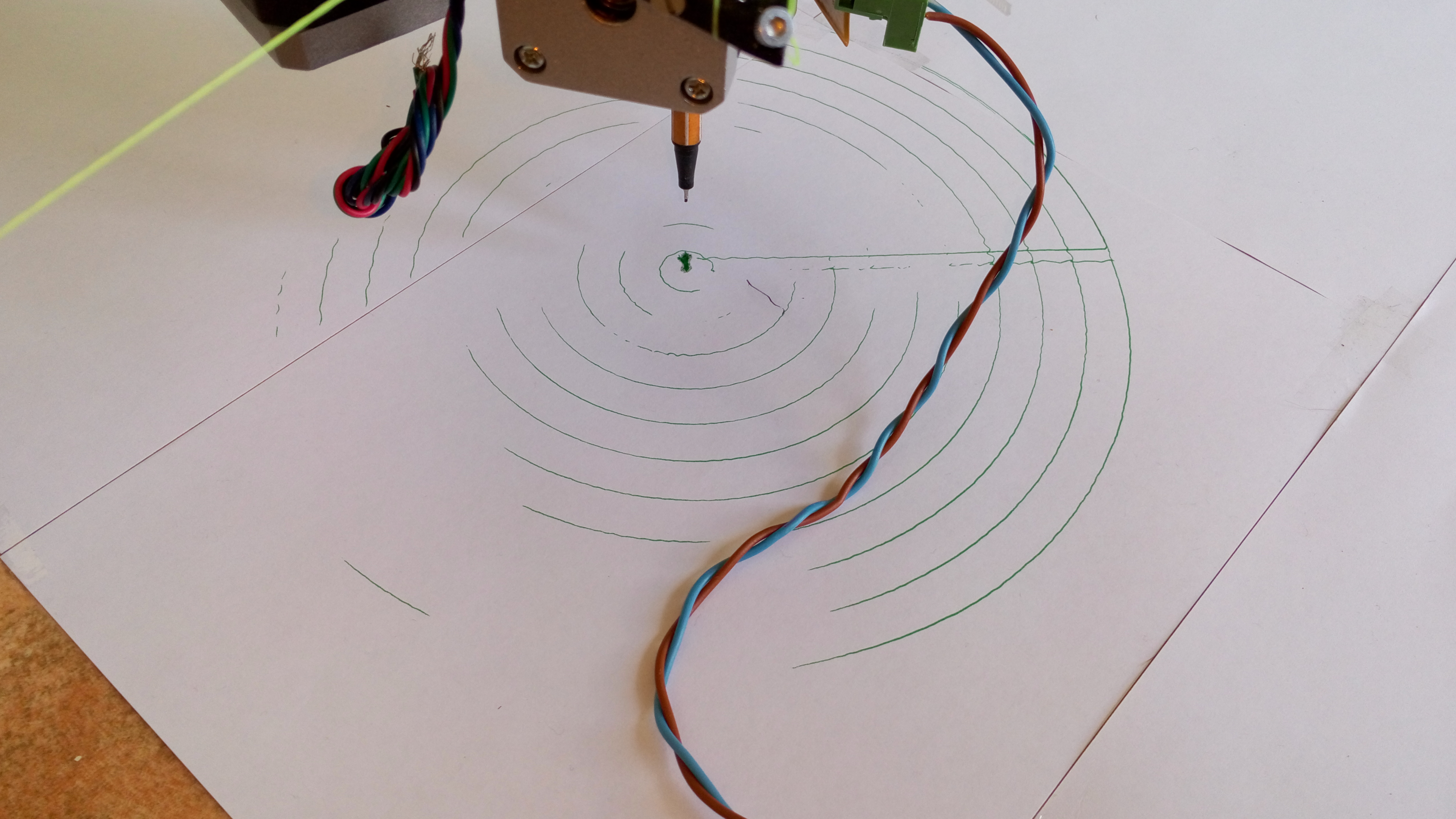
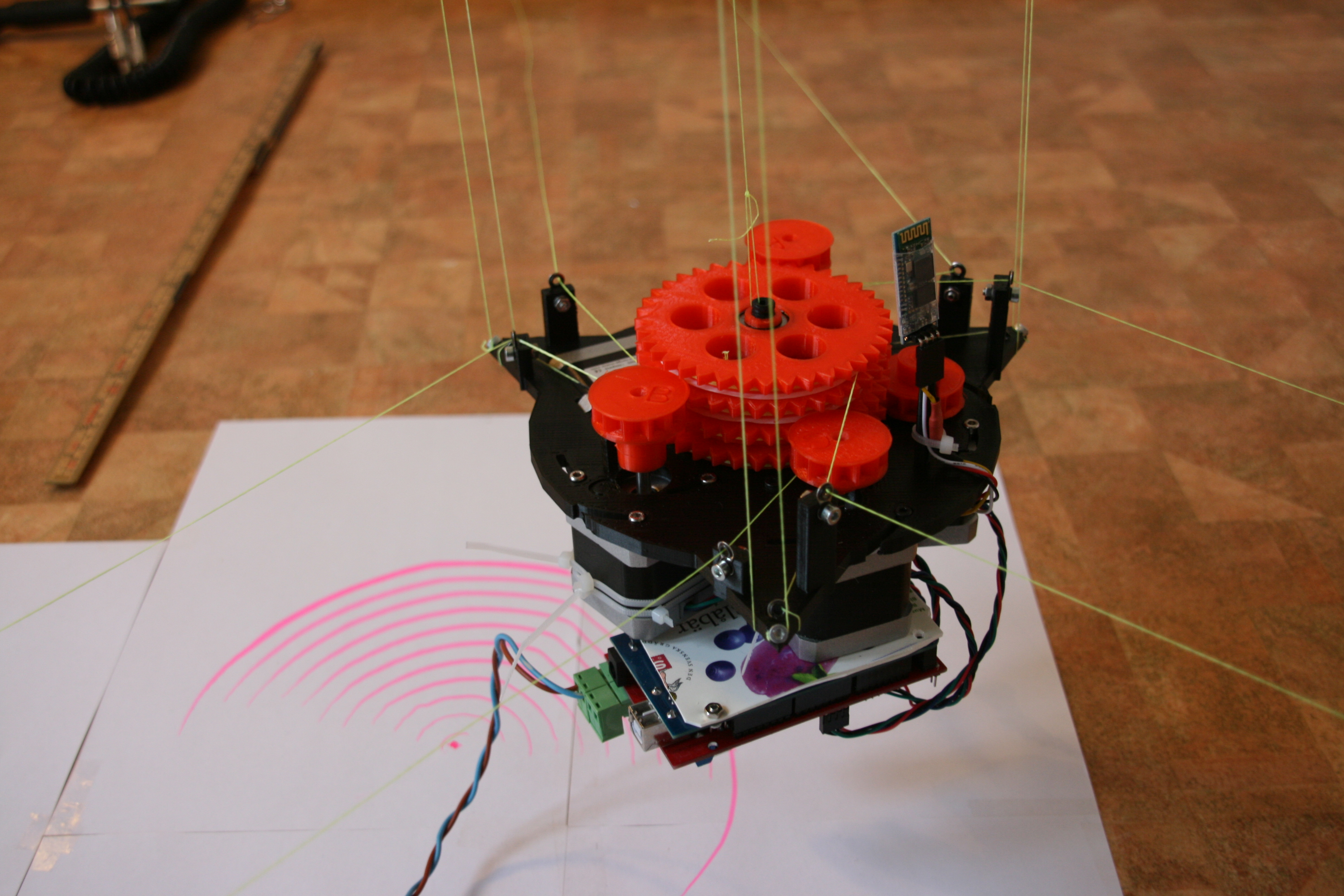
The Hangprinter and its first calibration circles. In the direction along the measurement stick, precision is ~2 mm, while
radius in the
right-left direction in the picture is 5 mm too small.
The circles being half indicates a z-error of at least 0.2 mm.
Circles are a good calibration pattern because the d-axis (upwards) is constant during circular movement.
Hence any errors in the abc-directions will affect line thickness, since we will also get a z-error, given that
the floor and the ceiling frame part are parallel.
I'm also happy because as a first prototype, Hangprinter has shown to be a rigid enough construction for things like 3d-printing,
when calibrated such that 4 or more abc-lines stay tight, as this video shows:
On the other hand, some large improvements need to me made before further testing can get up to speed.
Here's a little priority list for myself:
Spools need to keep lines in place.
The power supply should be at a higher voltage.
Eyelets are too large.
The extruder motor should be mounted so that direct feed is possible
The printer is too heavy.
Point 1 is the most important one, since stray lines makes testing really slow.
Points 2-4 are not super important, but they add upp.
A higher voltage power supply would give motors a higher torque, and maybe cure my DRV8825 drivers from the high pitch noises
they
make in my motors.
A higher voltage would also allow us to use thinner power supply cables, which is good.
I have ordered four NEMA14 motors. This saves us 360 g and some space, so we can make the printer smaller.
I have thought a lot about using suspended weigths instead of the d-motor.
The problem with that is holding it down. With anchor points 1 - 2 m away, and only 5 - 15 cm difference
between anchor point and action point, the tension in the abc-lines (together) need to be 10 - 20 times the tension in the
d-lines (together).
We could fine tune the weigths so that we only have 1 N pulling upwards.
According to my rough estimations, we would still lose 3 - 6 N cm of dynamic torque.
The gears on Hangprinter has an effective radius very close to 1 cm,
so we use N and N cm without converting factor.
My testing shows we have only 18 N cm dynamic torque in our Nema 17s (I expect the ordered Nema 14s to have only half of
that).
With an expected mass of ca 2 kg, the Hangprinter will need a force of 18 N to reach an acceleration of 9000 mm/s^2 (default
max acceleration in Marlin).
Even if we lower our expectations drastically from 9000 mm/s^2 down to 2000 mm/s^2, the most difficult working angles will
steal
enough force that we don't have 3 - 6 N cm to spare on each motor.
It seems like 3 beefy abc-steppers working at difficult angles and 4 smaller steppers working at ok angles will give similar
results.
It would be very interesting to build both, compare them and feel the difference...
- tobben
Torbjørn Ludvigsen
Today I'm kind of split in two. One part of me is very satisfied with having a moving robot, even though precision
is ~ 1cm. I want to play around with it, make it go high, low, fast and slow.
Hangprinter has climbed its first climb
16-9-2015
Just now, the Hangprinter was able to climb upwards for the first time.
To make it a bit easier, I halved the needed force by using small
v-groove bearings as pulleys in the ceiling frame part.
The pulley now mounted to the top frame part mounted to the ceiling.
The outermost screw lend itself as a practical attachment point for the loose end.
I find that having both loose ends attached at the printer side, rather than having one at the ceiling,
is practical when line lengths need to be adjusted.
Although I wrote in my last post that I would try to use full step mode, I realized that millimeter precision on the
D-axis (towards ceiling frame part) is not really what I want. Layer heights are usually expressed in micrometers, so I
decided to go for 16 microstep mode. Together with the pulley-arrangement, this gives Hangprinter ca 90 microsteps per mm,
or ca 11 micrometer per microstep.
Since microstepping reduces the holding torque of the stepper motors drastically (with 16 microsteps/step, you only have
ca 10 % holding torque left),
Hangprinter definitely needed some extra power.
I mounted a DRV8825 breakout board and ramped up the current to 1.4 A.
Both the motors and the driver are rated for higher currents, but I'm kind of nervous about getting a short thermal shutdown
of the DRV8825, as it would crush the printer to the floor.
Avoiding such a crash is the sole reason why I go for DRV8825 instead of the quieter and more easily handled a4988.
Changing the stepper driver did introduce some extra work, though.
DRV8825 needs longer pulse width than Marlin is used to sending
For solving this, I used five "nop" assembly operations.
In stepper.cpp
Each nop instruction takes one processor cycle, so five nops gives a 5/16k = 312.5 ns longer pulse width.
This gave the shortest working pulse width I found.
Stepper motor stutter, uneven microsteps
When running the stepper slowly, I noticed the exact same stutter problem that is shown here (Youtube-link).
The problem is that the mixed decay mode of the DRV8825 doesn't work properly with my motors, so setting it to fast decay
mode was necessary.
It was Quentin Harley that put me on the right track with this post.
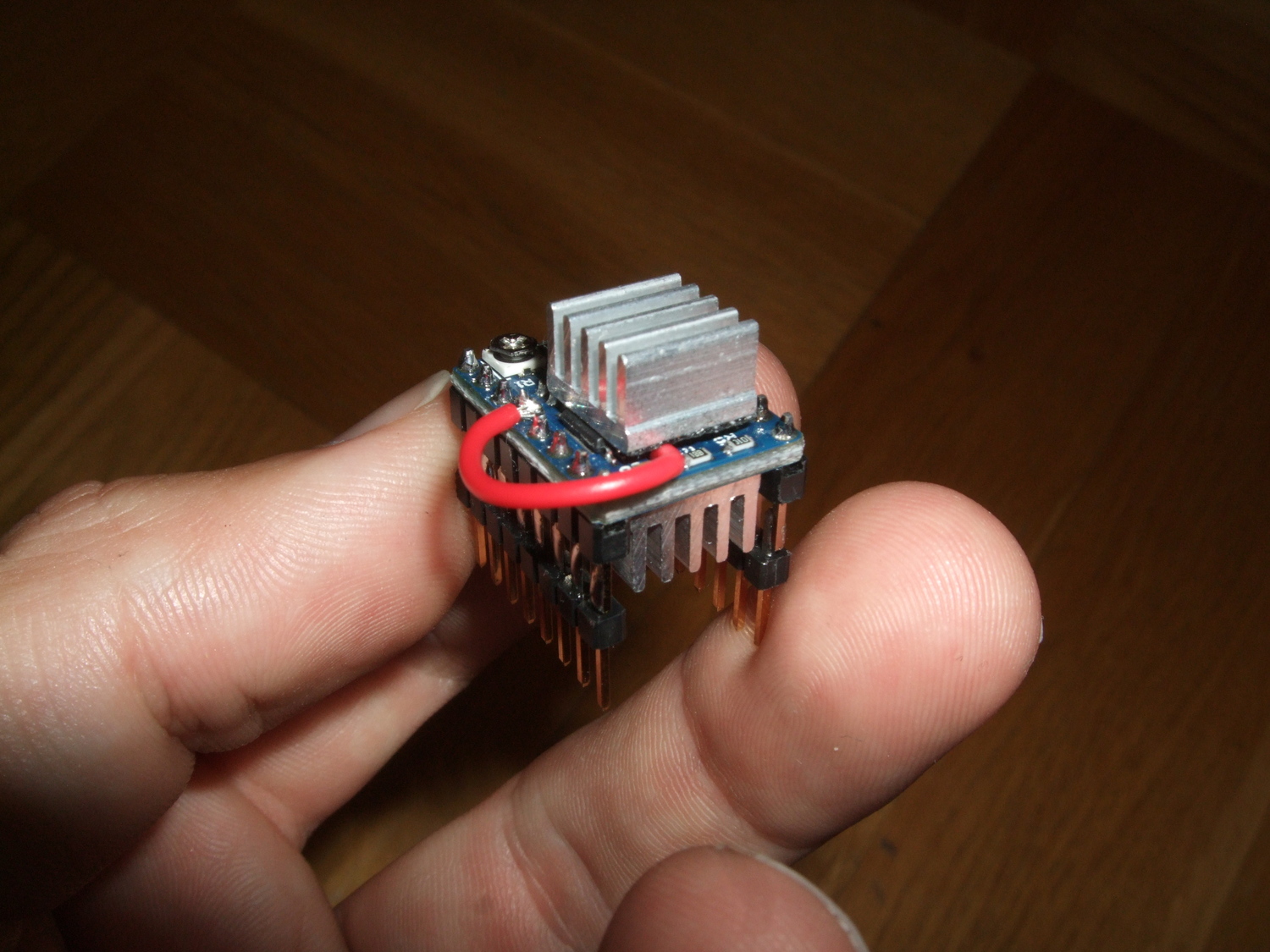
This is how my D-axis stepper driver ended up looking. The extra cable is for enabling fast decay mode.
The extra long legs are for making space for extra cooling rib. The extra cooling rib is for avoiding thermal shutdowns
and total disaster.
Hangprinter is flippable
To access the lower side of the Hangprinter, where the electronics are and the extruder+hot end will be, just flip it
around.
Wind the lines an extra time around the corners if needed ;-)
Finally, here is a video of the Hangprinter climbing its first climb.
- tobben
Torbjørn Ludvigsen
Just now, the Hangprinter was able to climb upwards for the first time.
To make it a bit easier, I halved the needed force by using small
v-groove bearings as pulleys in the ceiling frame part.
Hangprinter has hung its first hang
13-9-2015
Mounted Hangprinter frame in the ceiling today.
The poor little Nema17 was too weak to climb upwards without some help.
Will put it in full step mode and give it some more current tomorrow.
If that still isn't enough, I will print new gears (gear it down).
Having pulleys in the top frame part, effectively gearing down almost half the force needed, is the next option I'll try.
Using rolling fairleads on the Hangprinter itself might just be worth it after all.
Both gearing down and adding bearings introduces risks of greater errors.
I save the complicated analysis of them for another day...
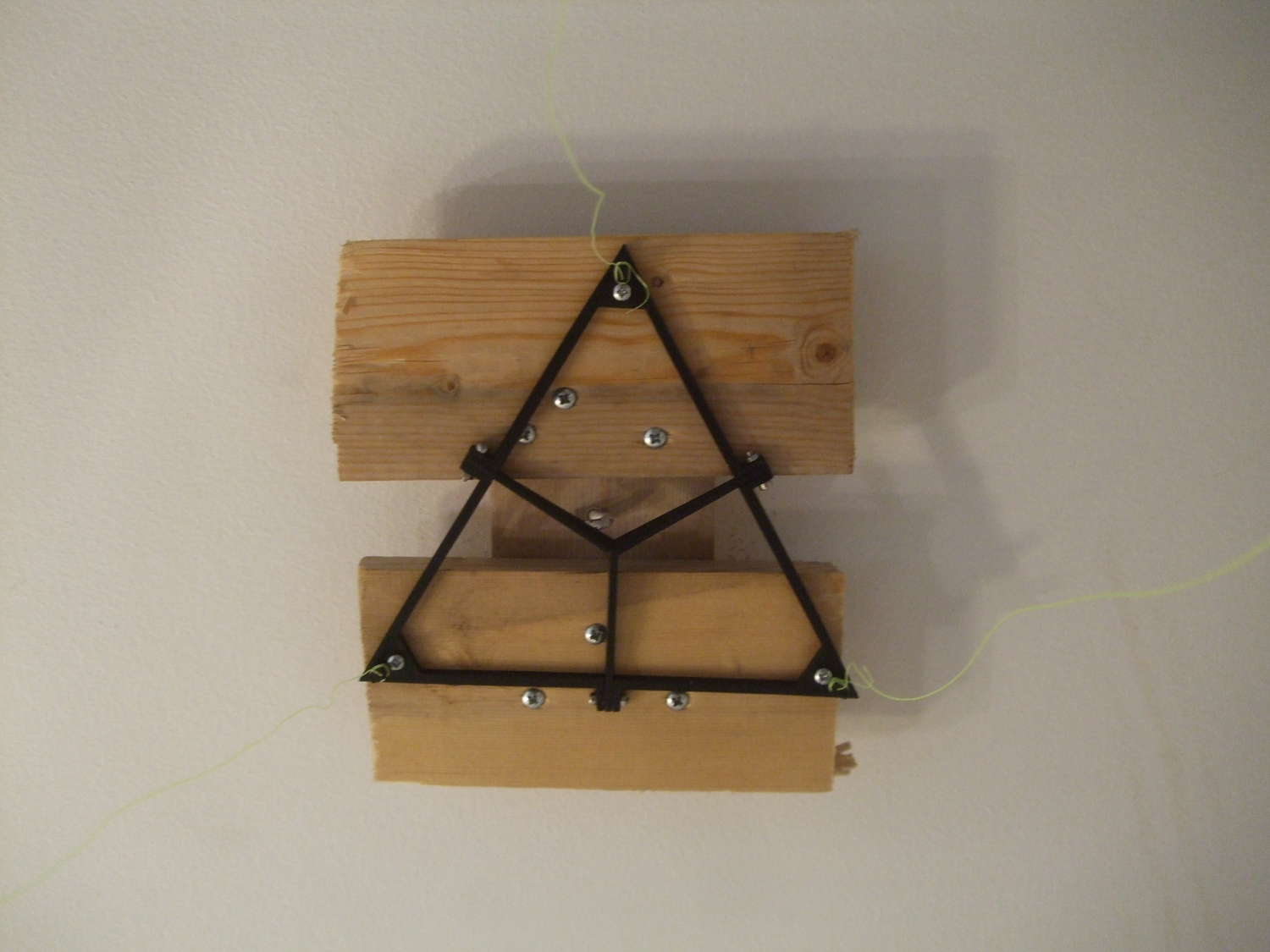
The top frame part mounted to the ceiling.
The Hangprinter hanging its first hang. Sorry for the poor image quality.
- tobben
Torbjørn Ludvigsen
Mounted Hangprinter frame in the ceiling today.
The poor little Nema17 was too weak to climb upwards without some help.
Will put it in full step mode and give it some more current tomorrow.
If that still isn't enough, I will print new gears (gear it down).
Having pulleys in the top frame part, effectively gearing down almost half the force needed, is the next option I'll try.
Using rolling fairleads on the Hangprinter itself might just be worth it after all.
Hangprinter had its first dry run
11-9-2015
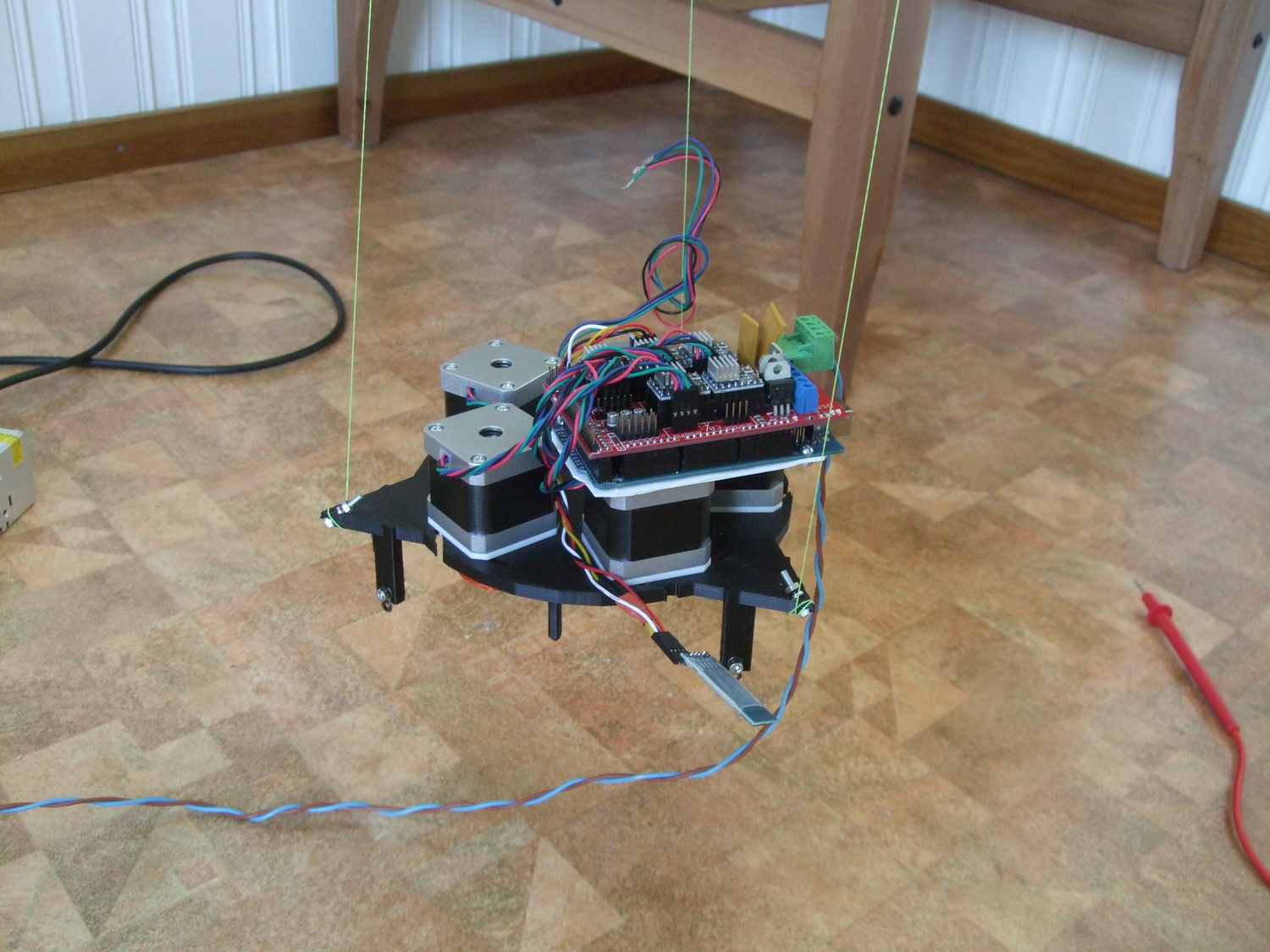
Hello again! Just thought I'd share progress again. The Hangprinter has gotten its firmware and bluetooth module working
=) Video:
- tobben
Torbjørn Ludvigsen
Hello again! Just thought I'd share progress again. The Hangprinter has gotten its firmware and bluetooth module working
=) Video:
Summer update on the Hangprinter
21-6-2015
Hello folks! Just wanted to share some progress.
OpenSCAD Work
The scad-files have gone through a big reorganization and refinement.
I had the insight while hacking on the firmware that a lot of constants will
be shared between the firmware and the scad-files.
Therefore, I tried to parametrize the CAD-files with as straightforward parameters I could come up with
and put all the parameters in a file called design_numbers.scad.
When the time comes to compile and upload the firmware, one may (should) make a little script that
parses design_numbers.scad into design_numbers.h, compiles Marlin and removes design_numbers.h immediately afterwards.
Test Printing
A complete print of Hangprinter is still not done, but many parts are printed for testing.
The parts that have been test-printed are the cylinder holding the largest gears in place,
the largest gears themselves, the motor gears and the outermost corners of the printer
(called bottom_plate in the scad-files).
Render of the whole printer as it looks right now.
Many potentially over-simplifying design decisions have been made to avoid
over engineering. I expect precision of this configuration to be pretty bad,
but before implementing complex mitigations, I want to see just how bad the simplest
solution performs.
The motor gears have inscriptions depending on which direction they're driving.
Directions A, B and C are directions towards anchor points near the floor, and the
D direction is from the printer up towards the ceiling.
Six failed attempts at making the central cylinder flexible but still sturdy enough.
The cylinder at the left, holding the large gears (in the scad-files called the Sandwich),
is just a plain cylinder. Rings are printed independently and sandwiched between the large gears
to separate them (these rings are called locks in the scad-files).
One such ring is visible over the bearing on the left.
One of the three corners of the Hangprinter bottom plate. This one holds the fairlead (fishing rod ring)
in place nicely, but is a bit too thin to hold horizontal screws with 5 mm heads.
No horizontal screws are shown in the picture, but they are used to keep the extruder motor in place
(see first picture in this post).
A test print of the three corners of the Hangprinter.
Size is made to fit a 20 x 20 cm print area when rotated 15 degrees around the z-axis.
E3D Sponsoring
I watched an enlightening hot end
talk
recently, that the E3D-guys held at the Midwest RepRap Festival 2015.
In the middle of the talk, they say:
"If you're doing a thesis or anything, just get in touch, we'll give you free stuff. We want to encourage such."
Since they happen to be the only company I know that produces hot ends specialized for very high extrusion rates,
and since they get excellent reviews,
I decided to break my shyness and ask kindly for a
Volcano Power Pack.
The E3D guys were very positive, and gave me a
large diameter hobbed bolt
and some extra filament as well =D
So I'm designing Hangprinter to fit with a E3D V6 hot end by default.
If you're not familiar with it, check out Tom's reviews on Youtube:
Tom's review of E3D V6 Tom's review of Volcano
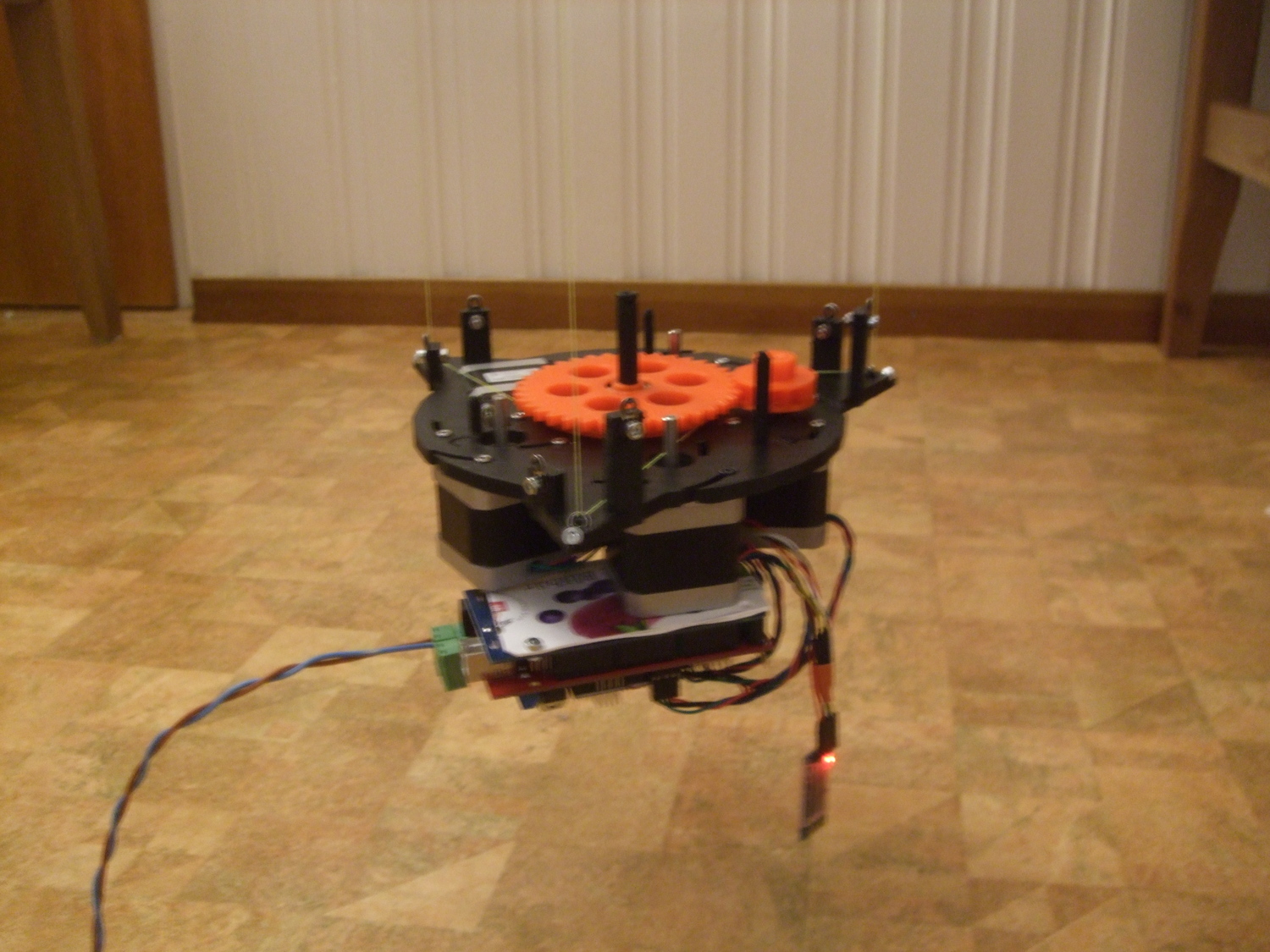
Hi all! There has been some progress on the Hanprinter project this spring as well.
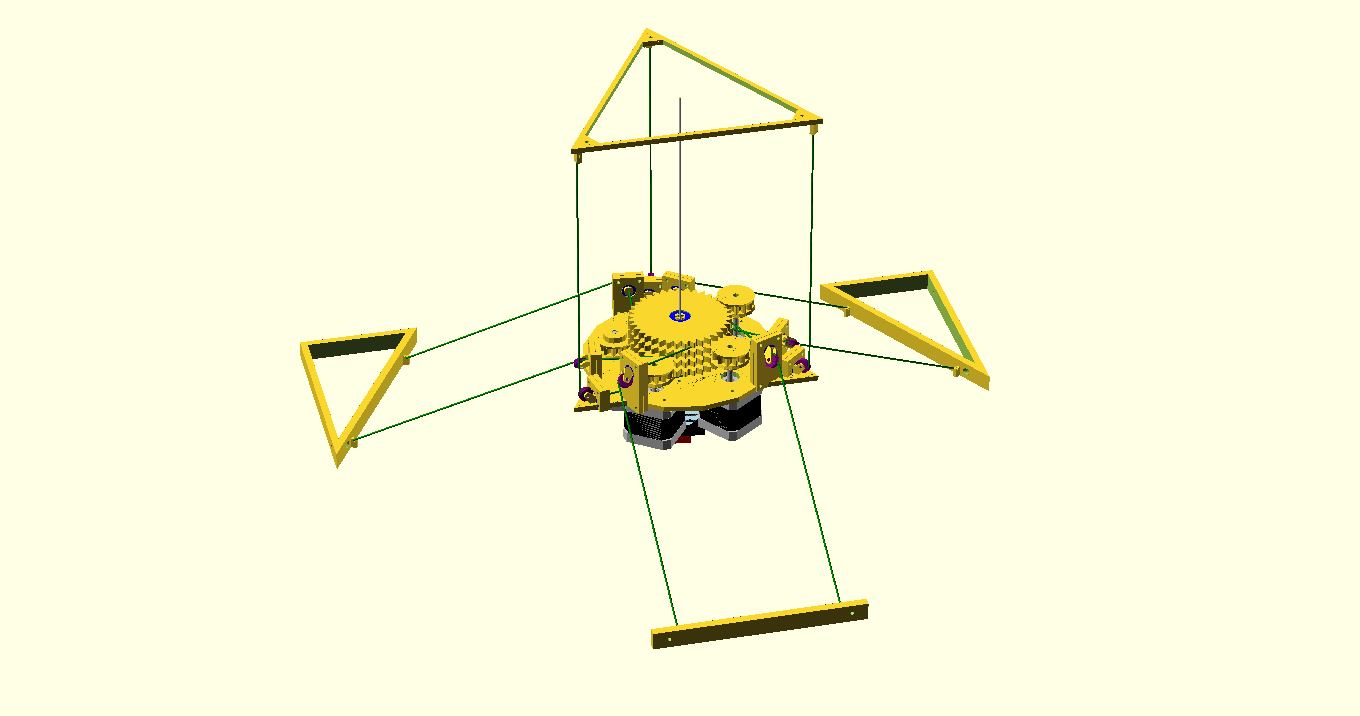
The printer is not hanging there, but it soon will. A CAD model has been created:
A render of the Hangprinter from 19th of May.
Note that the first version will probably avoid the rolling fairleads (purple in this render),
since they introduce build cost in time, money and firmware computations a lot.
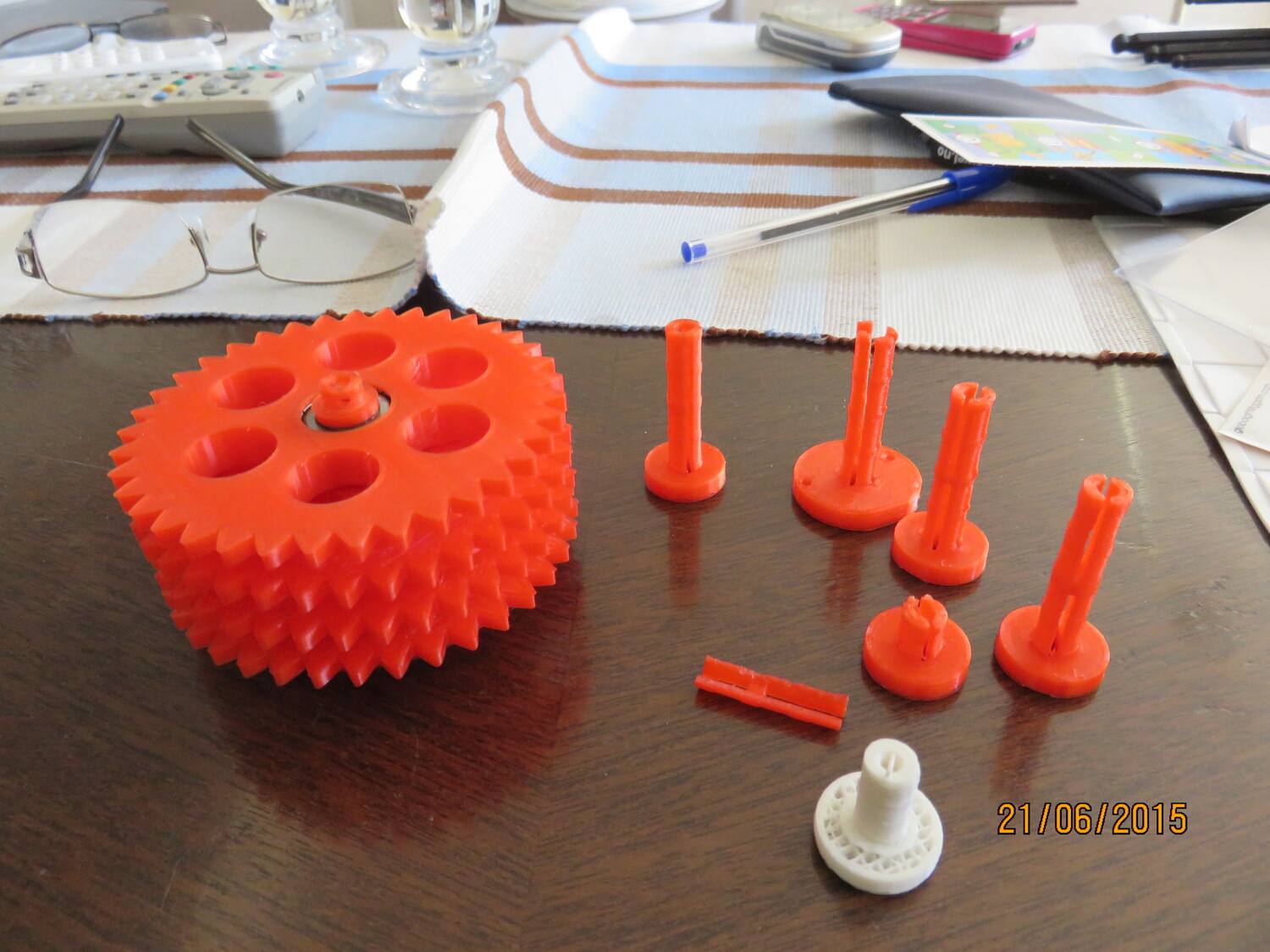
And some parts have been printed:
Some of the printed gears to be used on the first version of the hanging RepRap.
Finding a Neighbourhood
The project will have its home at the Chalmers Robotics' lab
in Johanneberg, Gothenburg. (Drop by if you're in town and in for a coffee and a chat!)
The lab is a very special place with 4 m headroom, thousands of soda-cans stacked up, dozens of computer screens,
mystical electrical components
from another era lying around everywhere, expensive tools like lathe and bandsaw available at any time
and skilled hackers and robot builders hanging around 24/7. And best of all: another parallel cable driven robot
is being built there right now, so Hangprinter can grow up with a friend in the close neighbourhood.
Main idea
The printer will try to live up to the RepRap projects original objective of
trying to build a robot that is as self replicating as possible.
My favourite way of putting this is something like: Every Hangprinter owner should be able to
make another Hangprinter.
I'll try to make separate posts adressing some mechanics, firmware, project background/motivation
and general progress.
Please visit the forum thread
for discussion and the repo for source code!
All the best!
- tobben
Torbjørn Ludvigsen
Hi all! There has been some progress on the Hanprinter project this spring as well.
The printer is not hanging there, but it soon will. A CAD model has been created:
The Slideprinter
6-3-2015
There have been some progress on the Hangprinter project this winter.
Well, the progress is as small as the number of hours that have been put into it,
but if we put the optimistic glasses on, we can say gone from 1d to non-trivial 2d movement.
The Slideprinter (a 2d-Hangprinter), and the first three attempts at drawing
a circle from gcode. The first attempt at drawing a square also shown.
The reason why two of the "circles" are only lines is confusion whether the firware was
expecting absolute or relative coordinates.
The main reason that the triangular "circle"'s triangularity is a too high number of steps/mm.
The firmware that Slideprinter is currently running is a very slightly modified version of Marlin
with the following lines of code added to the function calculate_delta:
Note that this code will only handle relative moves correctly.
This code affects the max speed of the printer since Marlin (Delta conf) chops straight lines into
a hard-coded number of line-segments per second.
Since Slideprinter doesn't have enough accuracy or precision for this to matter, I've put
number of line segments to 20 (which is small).
Comparison between Slideprinters fifth circle and a circle drawn with a pair of compasses.
The outermost line is that from the compasses, most of the time.
I also filmed Slideprinter as it moved. Sorry for the darkness.
Vimeo.
Torbjørn Ludvigsen
There have been some progress on the Hangprinter project this winter.
Well, the progress is as small as the number of hours that have been put into it,
but if we put the optimistic glasses on, we can say gone from 1d to non-trivial 2d movement.
Everything on this homepage, except those videos who are published via Vimeo or Youtube, is licensed under the Gnu Free Documentation License.
The videos published via Vimeo or Youtube are also licensed via Vimeo or Youtube.